1
/
の
8
PayPal, credit cards. Download editable-PDF and invoice in 1 second!
T/ITS 0002-2014 英語 PDF (TITS0002-2014)
T/ITS 0002-2014 英語 PDF (TITS0002-2014)
通常価格
$590.00 USD
通常価格
セール価格
$590.00 USD
単価
/
あたり
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
配信: 3 秒。真の PDF + 請求書をダウンロードしてください。
1分で見積もりを取得: T/ITS 0002-2014をクリック
過去のバージョン: T/ITS 0002-2014
True-PDF をプレビュー(空白の場合は再読み込み/スクロール)
T/ITS 0002-2014: インテリジェント交通システム - 全速度域アダプティブクルーズコントロールシステム - 性能要件およびテスト手順
0002-2014 翻訳
おっぱい
インテリジェント交通産業連盟
中華人民共和国の標準
ICS43.020
T06
インテリジェント交通システム - 全速度範囲
アダプティブクルーズコントロールシステム - パフォーマンス
要件とテスト手順
発行日: 2014年11月24日
実施日: 2015年1月1日
発行元:中国インテリジェント交通産業連盟
目次
序文…3
はじめに…4
1 範囲 ... 5
2 規範的参照 ... 5
3 用語と定義 ... 6
4 分類 ... 8
5 パフォーマンス要件 ... 9
6 性能評価のための試験方法 ... 17
附属書A(規範)関連技術説明...24
インテリジェント交通システム - 全速度範囲
アダプティブクルーズコントロールシステム - パフォーマンス
要件とテスト手順
1 範囲
この規格は、基本的な制御戦略、最低限の機能
要件、基本的な対話方法、診断の最小要件
障害への対応、およびフルスピードのシステムパフォーマンステスト方法
レンジアダプティブクルーズコントロールシステム(以下、FSRA)
車両。
FSRAシステムは、障害物のない道路や混雑した道路状況に適しています。
高速道路(つまり、非動力車や
歩行者の通過を阻止する。対象車両の縦方向の制御を提供する。
運転速度範囲はゼロから最高速度制限までです。
システムによって設定できます。システムは、対象車両を
減速能力が限界内の前線車両。そしてそれは
運転者が運転を継続するためにシステムにコマンドを入力すると、再び始動します。
このシステムは静止または低速で移動するターゲットには反応しません。
(GB/T 20608のアダプティブクルーズコントロールシステム規格に準拠)
(2006年)
2 規範的参照
以下の参照文書は、
この文書。日付のある参考文献については、引用された版のみが適用されます。日付のない参考文献については、
参考文献、参照文書の最新版(
(改正)が適用されます。
GB/T 20608-2006、インテリジェント交通システム - アダプティブクルーズ
制御システム - 性能要件とテスト手順
JTG B01-2003、道路工学の技術基準
ISO 15623:2013、輸送情報および制御システム - 前進
車両衝突警報システム - 性能要件とテスト
手順
ISO 22179:2009、インテリジェント交通システム - 全速度域適応型
3.6 前方車両
対象車両が位置する道路の前方に位置する車両
旅行中であり、同じ方向に旅行中である
3.7 自由に流れる交通
スタートストップや緊急ブレーキ条件、スムーズな流れ、重い
渋滞
3.8 時間ヘッドウェイ、THW
同じ道路を走行する2台の車両間の距離を表すために時間を使用する
経路を決定し、2台の車両間の距離を
対象車両の速度
3.9 速度設定
ドライバーまたは他の制御システムによって設定された希望の走行速度
FSRAシステムよりも
注: この速度は、車両の制御下にある車両の最高予想速度です。
FSRAシステム。
3.10 定常状態
関連するパラメータが変化しない車両の状態
時間と距離
3.11 対象車両
全速度域アダプティブクルーズコントロールを搭載した車両
この規格で定義されるシステム
3.12 システム状態
システムの動作の特定の段階または状態
1) FSRAオフ
直接的な行動によって FSRA システムをトリガーすることはできません。
2) FSRAスタンバイ
FSRAシステムは、
車両では、ドライバーが作動状態に入るようにトリガーすることができます
いつでも。
3) FSRA アクティブ
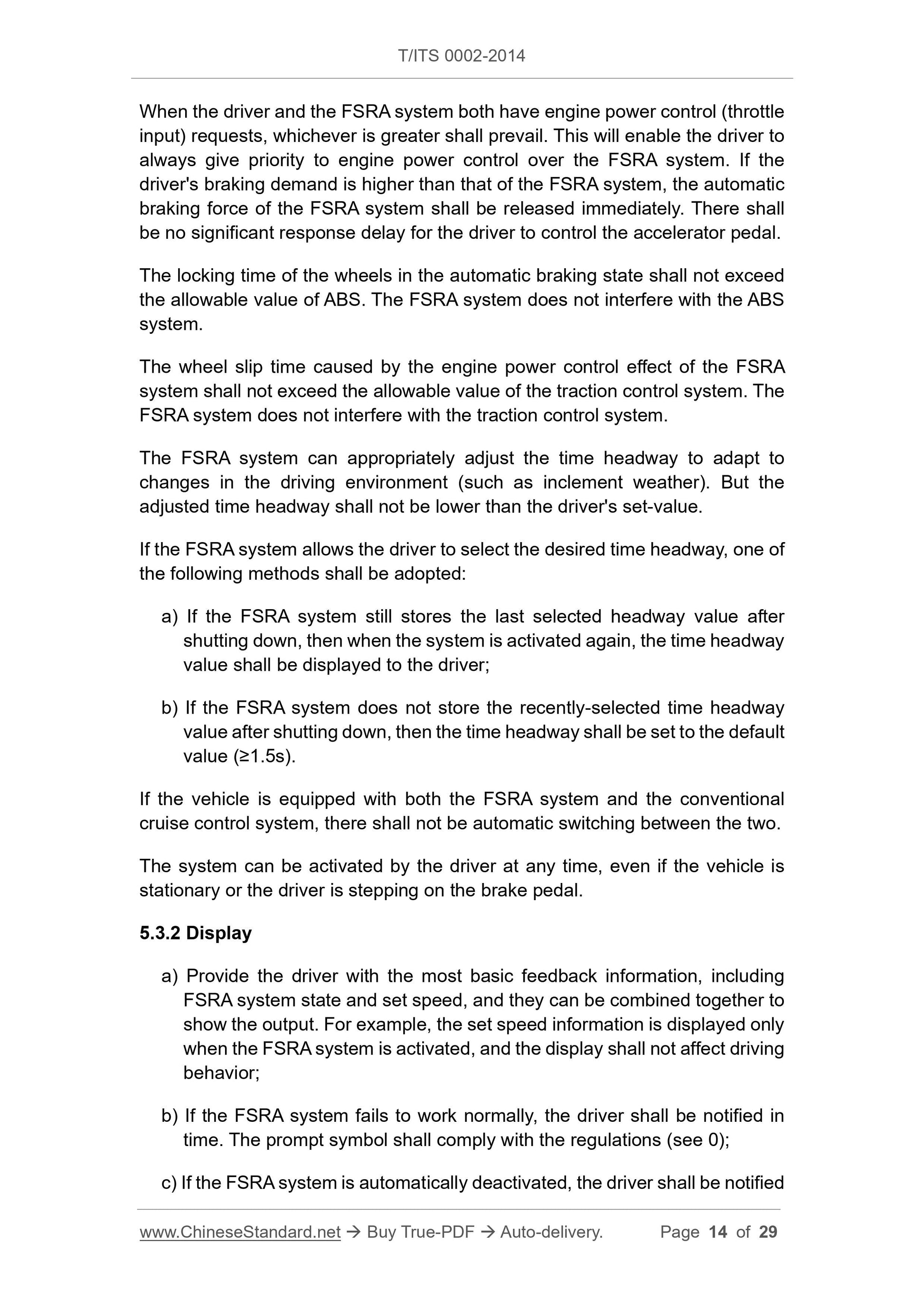
5) ホールド状態では、自動駐車制御が使用され、
対象車両が停止している(電子ブレーキ機能を引き継ぐため)
ESP)。
5.2 機能
5.2.1 制御モード
距離制御状態と速度制御状態の切り替え
システムによって自動的に完了されます。
5.2.2 静止または低速移動ターゲット
システムは、対象車両をターゲット車両の後ろで停止させようとします。
減速能力。システムが静止状態または低速状態に対応するかどうか
動くターゲットの場合、この規格では必須の設計要件は規定されていません。
システムが静止したターゲットやゆっくりと移動するターゲットに反応しない場合は、
車両のユーザーマニュアルに記載されています。
5.2.3 車両追従能力
車両が定常走行しているとき、
車両はMAX(cmin, τmin×v)に設定する必要があります。過渡状態で運転する場合
状況によっては、クリアランスが一時的に最小クリアランスよりも低くなることがあります。
このとき、システムは自動調整機能を備え、
クリアランスを希望の値に設定します。
車速が8m/sを超える場合、車間距離の設定範囲は以下のようになります。
1.5s≤τ≤2.2s。[GB/T 20608-2006、定義5.2.2]
最低要件: 対象車両が減速して停止し始めるとき
停止と運転速度と同様に、システムは対象を制御することができます
車両を目標車両の後ろに停止させます。
ここで、cminはシステムが動作しているときの最小定常ヘッドウェイである。
以下の制御モードでは、全速度範囲(ホールドを含む)で
状態)、かつcmin≥2mである。
τminは選択可能な最小定常時間間隔であり、
全速度範囲τmin≥1sでFSRA制御に使用できます。
vは対象車両の速度である。
τは時間間隔です。
停止速度 =2.5m/s2;
vstopping =10m/s。
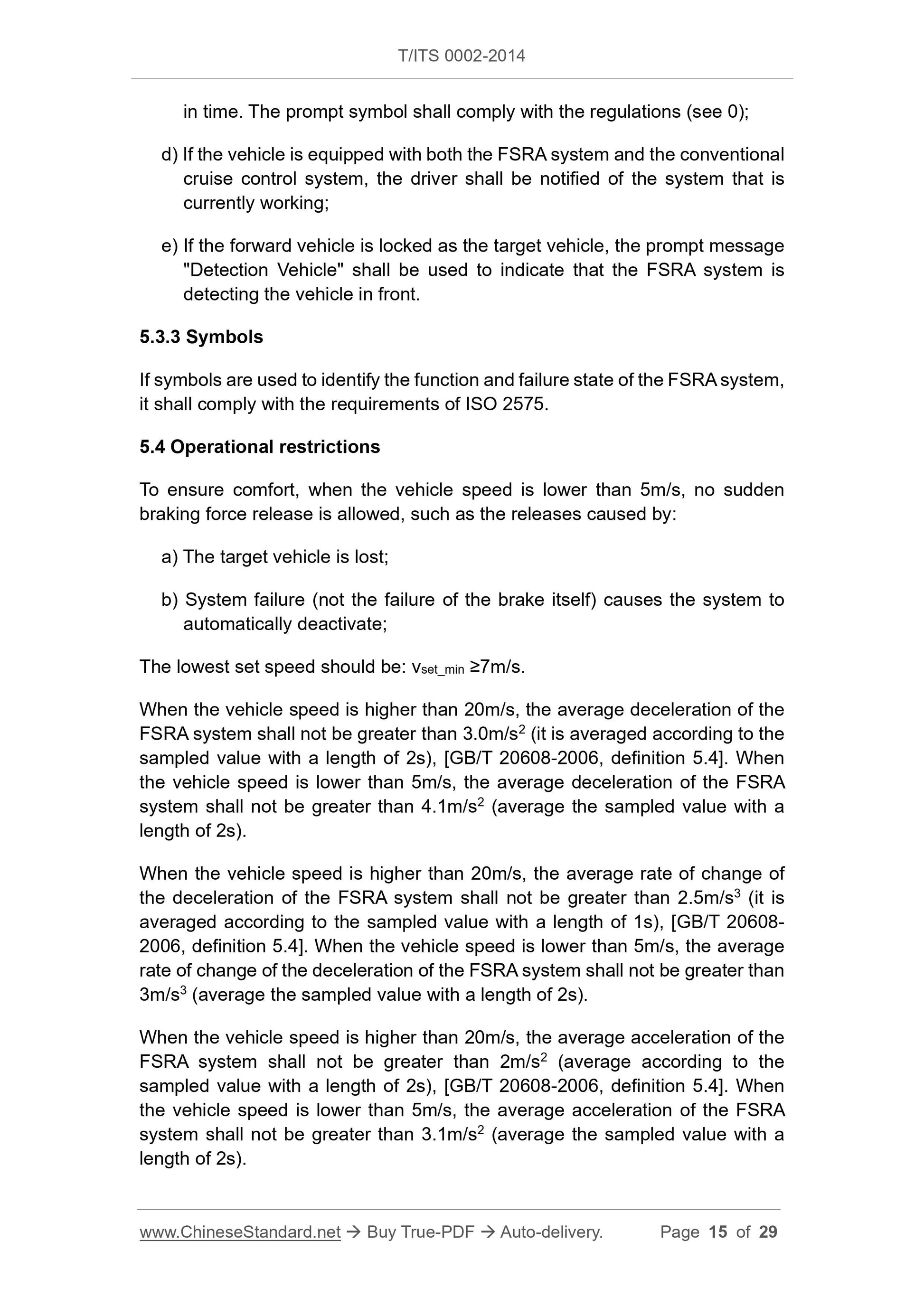
ドライバーとFSRAシステムの両方がエンジン出力制御(スロットル
入力要求のうち、大きい方が優先されます。これにより、ドライバーは
FSRAシステムよりもエンジン出力制御を常に優先してください。
ドライバーのブレーキ要求がFSRAシステムよりも高い場合、自動
FSRAシステムのブレーキ力は直ちに解除されなければならない。
運転者がアクセルペダルを制御する際に大きな反応遅延が発生しないこと。
自動ブレーキ状態での車輪のロック時間は、
ABSの許容値。FSRAシステムはABSに干渉しない。
システム。
FSRAのエンジン出力制御効果による車輪スリップ時間
システムはトラクションコントロールシステムの許容値を超えてはならない。
FSRA システムはトラクション コントロール システムに干渉しません。
FSRAシステムは、状況に応じて時間間隔を適切に調整することができます。
運転環境の変化(悪天候など)によっても異なりますが、
調整された運転間隔は運転手の設定値よりも低くならないものとする。
FSRAシステムで運転手が希望する時間間隔を選択できる場合、
以下の方法を採用するものとする。
a) FSRAシステムが最後に選択されたヘッドウェイ値を保存している場合
シャットダウン後、システムが再び起動すると、時間間隔が
値は運転手に表示されるものとする。
b) FSRAシステムが最近選択された時間間隔を保存していない場合
シャットダウン後に値を変更した場合、時間間隔はデフォルトに設定される。
値(≥1.5秒)。
車両にFSRAシステムと従来のシステムの両方が搭載されている場合
クルーズコントロールシステムの場合、両者の自動切り替えは行われないものとする。
システムは...
1分で見積もりを取得: T/ITS 0002-2014をクリック
過去のバージョン: T/ITS 0002-2014
True-PDF をプレビュー(空白の場合は再読み込み/スクロール)
T/ITS 0002-2014: インテリジェント交通システム - 全速度域アダプティブクルーズコントロールシステム - 性能要件およびテスト手順
0002-2014 翻訳
おっぱい
インテリジェント交通産業連盟
中華人民共和国の標準
ICS43.020
T06
インテリジェント交通システム - 全速度範囲
アダプティブクルーズコントロールシステム - パフォーマンス
要件とテスト手順
発行日: 2014年11月24日
実施日: 2015年1月1日
発行元:中国インテリジェント交通産業連盟
目次
序文…3
はじめに…4
1 範囲 ... 5
2 規範的参照 ... 5
3 用語と定義 ... 6
4 分類 ... 8
5 パフォーマンス要件 ... 9
6 性能評価のための試験方法 ... 17
附属書A(規範)関連技術説明...24
インテリジェント交通システム - 全速度範囲
アダプティブクルーズコントロールシステム - パフォーマンス
要件とテスト手順
1 範囲
この規格は、基本的な制御戦略、最低限の機能
要件、基本的な対話方法、診断の最小要件
障害への対応、およびフルスピードのシステムパフォーマンステスト方法
レンジアダプティブクルーズコントロールシステム(以下、FSRA)
車両。
FSRAシステムは、障害物のない道路や混雑した道路状況に適しています。
高速道路(つまり、非動力車や
歩行者の通過を阻止する。対象車両の縦方向の制御を提供する。
運転速度範囲はゼロから最高速度制限までです。
システムによって設定できます。システムは、対象車両を
減速能力が限界内の前線車両。そしてそれは
運転者が運転を継続するためにシステムにコマンドを入力すると、再び始動します。
このシステムは静止または低速で移動するターゲットには反応しません。
(GB/T 20608のアダプティブクルーズコントロールシステム規格に準拠)
(2006年)
2 規範的参照
以下の参照文書は、
この文書。日付のある参考文献については、引用された版のみが適用されます。日付のない参考文献については、
参考文献、参照文書の最新版(
(改正)が適用されます。
GB/T 20608-2006、インテリジェント交通システム - アダプティブクルーズ
制御システム - 性能要件とテスト手順
JTG B01-2003、道路工学の技術基準
ISO 15623:2013、輸送情報および制御システム - 前進
車両衝突警報システム - 性能要件とテスト
手順
ISO 22179:2009、インテリジェント交通システム - 全速度域適応型
3.6 前方車両
対象車両が位置する道路の前方に位置する車両
旅行中であり、同じ方向に旅行中である
3.7 自由に流れる交通
スタートストップや緊急ブレーキ条件、スムーズな流れ、重い
渋滞
3.8 時間ヘッドウェイ、THW
同じ道路を走行する2台の車両間の距離を表すために時間を使用する
経路を決定し、2台の車両間の距離を
対象車両の速度
3.9 速度設定
ドライバーまたは他の制御システムによって設定された希望の走行速度
FSRAシステムよりも
注: この速度は、車両の制御下にある車両の最高予想速度です。
FSRAシステム。
3.10 定常状態
関連するパラメータが変化しない車両の状態
時間と距離
3.11 対象車両
全速度域アダプティブクルーズコントロールを搭載した車両
この規格で定義されるシステム
3.12 システム状態
システムの動作の特定の段階または状態
1) FSRAオフ
直接的な行動によって FSRA システムをトリガーすることはできません。
2) FSRAスタンバイ
FSRAシステムは、
車両では、ドライバーが作動状態に入るようにトリガーすることができます
いつでも。
3) FSRA アクティブ
5) ホールド状態では、自動駐車制御が使用され、
対象車両が停止している(電子ブレーキ機能を引き継ぐため)
ESP)。
5.2 機能
5.2.1 制御モード
距離制御状態と速度制御状態の切り替え
システムによって自動的に完了されます。
5.2.2 静止または低速移動ターゲット
システムは、対象車両をターゲット車両の後ろで停止させようとします。
減速能力。システムが静止状態または低速状態に対応するかどうか
動くターゲットの場合、この規格では必須の設計要件は規定されていません。
システムが静止したターゲットやゆっくりと移動するターゲットに反応しない場合は、
車両のユーザーマニュアルに記載されています。
5.2.3 車両追従能力
車両が定常走行しているとき、
車両はMAX(cmin, τmin×v)に設定する必要があります。過渡状態で運転する場合
状況によっては、クリアランスが一時的に最小クリアランスよりも低くなることがあります。
このとき、システムは自動調整機能を備え、
クリアランスを希望の値に設定します。
車速が8m/sを超える場合、車間距離の設定範囲は以下のようになります。
1.5s≤τ≤2.2s。[GB/T 20608-2006、定義5.2.2]
最低要件: 対象車両が減速して停止し始めるとき
停止と運転速度と同様に、システムは対象を制御することができます
車両を目標車両の後ろに停止させます。
ここで、cminはシステムが動作しているときの最小定常ヘッドウェイである。
以下の制御モードでは、全速度範囲(ホールドを含む)で
状態)、かつcmin≥2mである。
τminは選択可能な最小定常時間間隔であり、
全速度範囲τmin≥1sでFSRA制御に使用できます。
vは対象車両の速度である。
τは時間間隔です。
停止速度 =2.5m/s2;
vstopping =10m/s。
ドライバーとFSRAシステムの両方がエンジン出力制御(スロットル
入力要求のうち、大きい方が優先されます。これにより、ドライバーは
FSRAシステムよりもエンジン出力制御を常に優先してください。
ドライバーのブレーキ要求がFSRAシステムよりも高い場合、自動
FSRAシステムのブレーキ力は直ちに解除されなければならない。
運転者がアクセルペダルを制御する際に大きな反応遅延が発生しないこと。
自動ブレーキ状態での車輪のロック時間は、
ABSの許容値。FSRAシステムはABSに干渉しない。
システム。
FSRAのエンジン出力制御効果による車輪スリップ時間
システムはトラクションコントロールシステムの許容値を超えてはならない。
FSRA システムはトラクション コントロール システムに干渉しません。
FSRAシステムは、状況に応じて時間間隔を適切に調整することができます。
運転環境の変化(悪天候など)によっても異なりますが、
調整された運転間隔は運転手の設定値よりも低くならないものとする。
FSRAシステムで運転手が希望する時間間隔を選択できる場合、
以下の方法を採用するものとする。
a) FSRAシステムが最後に選択されたヘッドウェイ値を保存している場合
シャットダウン後、システムが再び起動すると、時間間隔が
値は運転手に表示されるものとする。
b) FSRAシステムが最近選択された時間間隔を保存していない場合
シャットダウン後に値を変更した場合、時間間隔はデフォルトに設定される。
値(≥1.5秒)。
車両にFSRAシステムと従来のシステムの両方が搭載されている場合
クルーズコントロールシステムの場合、両者の自動切り替えは行われないものとする。
システムは...
共有