1
/
의
8
PayPal, credit cards. Download editable-PDF and invoice in 1 second!
T/ITS 0002-2014 영문 PDF (TITS0002-2014)
T/ITS 0002-2014 영문 PDF (TITS0002-2014)
정가
$590.00 USD
정가
할인가
$590.00 USD
단가
/
단위
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
배송: 3초. 실제 PDF + 송장을 다운로드하세요.
1분 안에 견적을 받으세요: T/ITS 0002-2014를 클릭하세요
역사적 버전: T/ITS 0002-2014
True-PDF 미리보기 (비어 있으면 다시 로드/스크롤)
T/ITS 0002-2014: 지능형 교통 시스템 - 전속도 범위 적응형 크루즈 제어 시스템 - 성능 요구 사항 및 테스트 절차
티에스 0002-2014
티/잇
지능형 교통 산업 연합
중화인민공화국 표준
ICS 43.020
티 06
지능형 교통 시스템 - 전체 속도 범위
적응형 크루즈 컨트롤 시스템 - 성능
요구 사항 및 테스트 절차
발행일: 2014년 11월 24일
구현일: 2015년 1월 1일
발행처: 중국 지능형 교통 산업 연합
목차
서문 ... 3
서론 ... 4
1 범위 ... 5
2 규범적 참조 ... 5
3 용어 및 정의 ... 6
4 분류 ... 8
5 성능 요구 사항 ... 9
6 성능평가를 위한 테스트 방법 ... 17
부록 A(규범) 관련 기술 설명 ... 24
지능형 교통 시스템 - 전체 속도 범위
적응형 크루즈 컨트롤 시스템 - 성능
요구 사항 및 테스트 절차
1 범위
이 표준은 기본 제어 전략, 최소 기능적 제어를 지정합니다.
요구사항, 기본 상호작용 방법, 진단을 위한 최소 요구사항
그리고 오류에 대한 대응 및 전체 속도에 대한 시스템 성능 테스트 방법
FSRA(Range Adaptive Cruise Control System)의
차량.
FSRA 시스템은 방해받지 않는 도로와 혼잡한 도로 상황에 적합합니다.
고속도로(즉, 비자동차가 통행할 수 없는 도로)에서는
보행자가 지나가는 것을 방지합니다. 이는 대상 차량에 대한 종방향 제어를 제공합니다.
운전. 작업 속도 범위는 0에서 최고 속도 제한까지입니다.
시스템에서 설정할 수 있습니다. 시스템은 대상 차량을 뒤에 주차할 수 있습니다.
감속 능력이 한계 내에 있는 추적식 전진 차량. 그리고 그것은 할 수 있습니다
운전자가 시스템에 운전 계속 명령을 입력한 후 다시 시작합니다.
시스템은 정지 또는 저속으로 이동하는 대상에 반응하지 않습니다.
(GB/T 20608의 적응형 크루즈 컨트롤 시스템 표준과 일치함)
2006).
2 규범적 참조
다음 참조 문서는 적용에 필수적입니다.
이 문서. 날짜가 있는 참조의 경우 인용된 버전만 적용됩니다. 날짜가 없는 참조의 경우
참조, 참조된 문서의 최신 버전(모든 참조 포함)
개정사항)이 적용됩니다.
GB/T 20608-2006, 지능형 교통 시스템 - 적응형 크루즈
제어 시스템 - 성능 요구 사항 및 테스트 절차
JTG B01-2003, 도로 공학 기술 표준
ISO 15623:2013, 운송 정보 및 제어 시스템 - Forward
차량 충돌 경고 시스템 - 성능 요구 사항 및 테스트
절차
ISO 22179:2009, 지능형 교통 시스템 - 전체 속도 범위 적응형
3.6 전방 차량
해당 차량이 있는 도로 앞에 위치한 차량
여행 중이고 같은 방향으로 여행 중입니다
3.7 자유로운 교통 흐름
시동-정지 및 비상 제동 조건, 원활한 흐름 및 무거운
교통
3.8 시간 헤드웨이, THW
동일한 경로를 주행하는 두 차량 사이의 거리를 나타내기 위해 시간을 사용합니다.
경로와 두 차량 사이의 거리를 나누어 계산합니다.
대상 차량의 속도
3.9 속도 설정
운전자 또는 기타 제어 시스템에 의해 설정된 원하는 주행 속도
FSRA 시스템보다
참고: 이 속도는 차량의 제어 하에 있는 예상 최고 속도입니다.
FSRA 시스템.
3.10 정상상태
관련 매개변수가 변경되지 않는 차량의 상태
시간과 거리
3.11 주제 차량
풀 스피드 범위 적응형 크루즈 컨트롤이 장착된 차량
이 표준에서 정의한 시스템
3.12 시스템 상태
시스템 작업의 특정 단계 또는 상태
1) FSRA 해제
어떠한 직접적인 행동도 FSRA 시스템을 발동할 수 없습니다.
2) FSRA 대기
FSRA 시스템은 종단적 통제에 참여하지 않습니다.
차량이지만 운전자가 작동 상태로 전환하도록 트리거할 수 있습니다.
언제든지.
3) FSRA 활성화
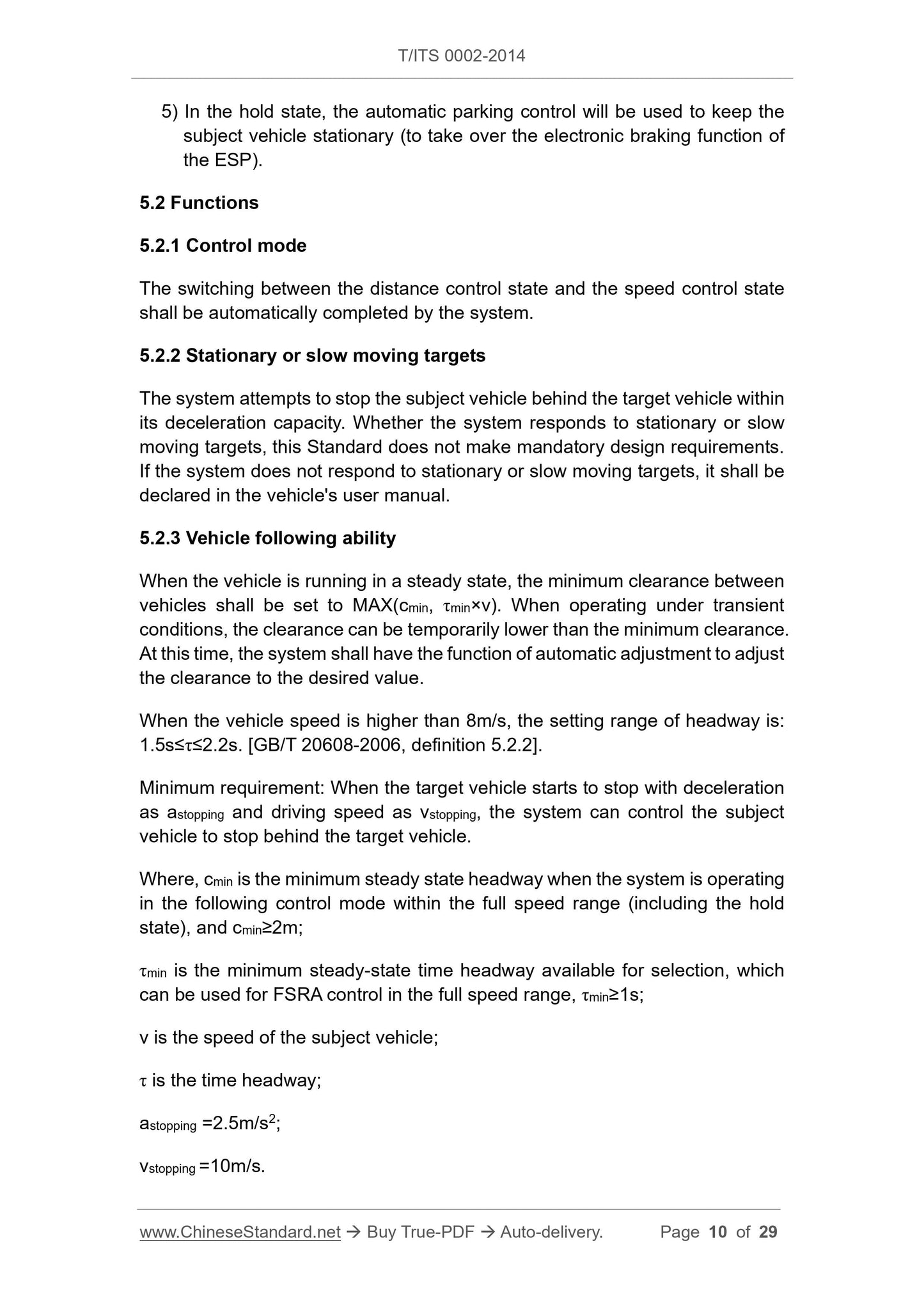
5) 보류 상태에서는 자동 주차 제어를 사용하여 보류 상태를 유지합니다.
차량 정지 상태(전자 브레이크 기능을 인수)
ESP).
5.2 기능
5.2.1 제어 모드
거리제어 상태와 속도제어 상태 간의 전환
시스템에 의해 자동으로 완료됩니다.
5.2.2 정지 또는 느리게 움직이는 타겟
시스템은 목표 차량 뒤에 있는 대상 차량을 정지시키려고 시도합니다.
감속 용량. 시스템이 정지 또는 느린 속도에 반응하는지 여부
움직이는 표적의 경우, 본 표준은 의무적인 설계 요구 사항을 제시하지 않습니다.
시스템이 정지 또는 느리게 움직이는 대상에 반응하지 않는 경우,
차량 사용 설명서에 명시되어 있습니다.
5.2.3 차량 추종 능력
차량이 정상 상태로 주행하는 경우 최소 간격은 다음과 같습니다.
차량은 MAX(cmin, τmin×v)로 설정해야 합니다. 과도 상태에서 작동할 때
조건에 따라 허가가 최소 허가보다 일시적으로 낮아질 수 있습니다.
이때 시스템은 자동조정 기능을 갖추어야 한다.
원하는 값으로의 클리어런스.
차량 속도가 8m/s보다 높은 경우, 간격 설정 범위는 다음과 같습니다.
1.5s≤τ≤2.2s. [GB/T 20608-2006, 정의 5.2.2].
최소 요구사항 : 대상 차량이 감속하여 정지하기 시작할 때
정지 속도와 주행 속도를 정지와 같이 시스템이 제어할 수 있습니다.
목표 차량 뒤에 차량을 정지시킵니다.
여기서, cmin은 시스템이 작동 중일 때의 최소 정상 상태 헤드웨이입니다.
다음 제어 모드에서는 전체 속도 범위(홀드 포함) 내에서
상태), 및 cmin≥2m;
τmin은 선택에 사용할 수 있는 최소 정상 상태 시간 간격입니다.
FSRA 제어에 전체 속도 범위(τmin≥1s)에서 사용 가능
v는 대상 차량의 속도이다.
τ는 시간 간격입니다.
정지 = 2.5m/s2;
정지 = 10m/s.
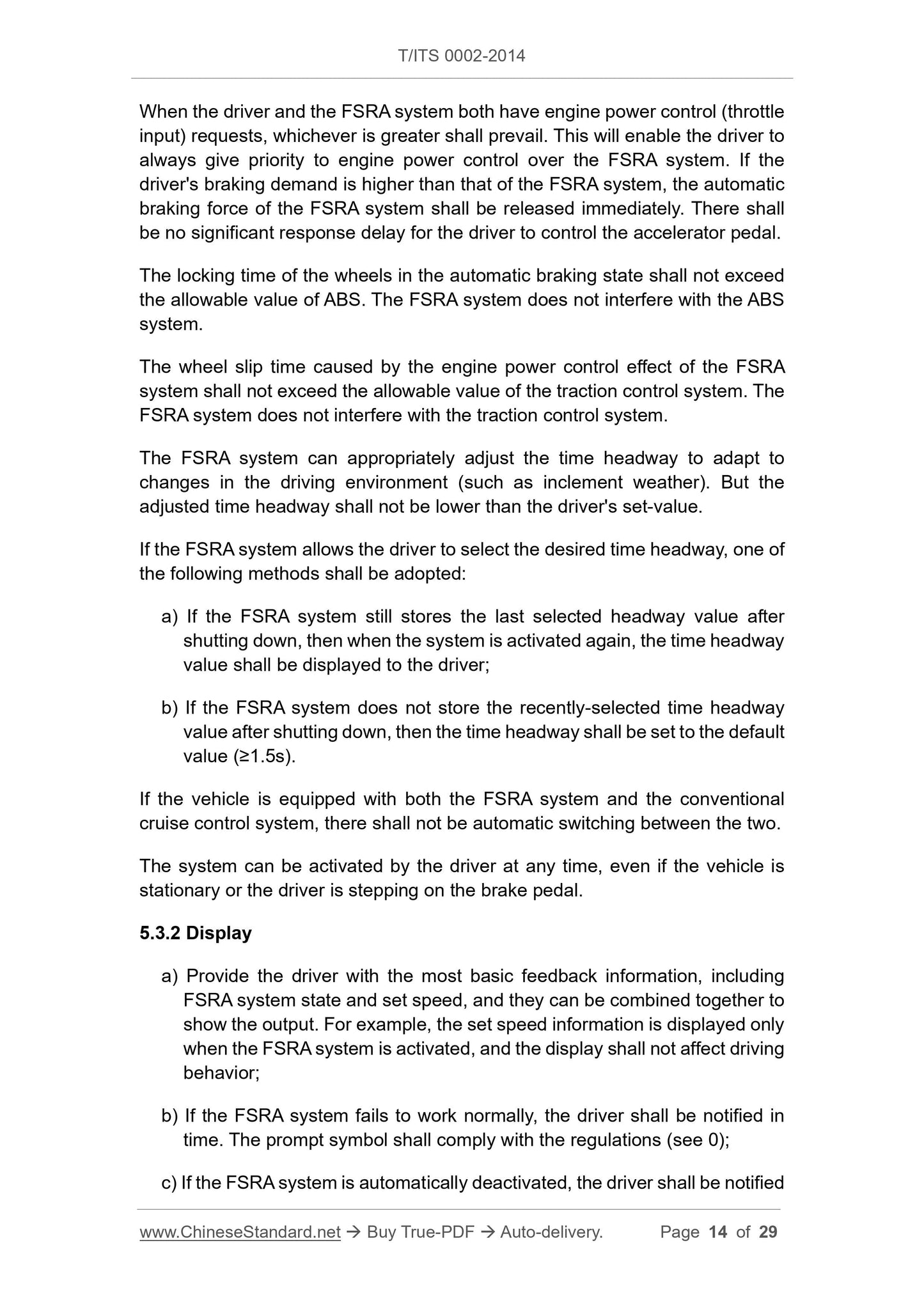
운전자와 FSRA 시스템 모두 엔진 동력 제어(스로틀)를 갖고 있는 경우
입력) 요청 중 더 큰 쪽이 우선합니다. 이를 통해 운전자는
항상 FSRA 시스템보다 엔진 동력 제어를 우선시하십시오.
운전자의 제동 요구량은 FSRA 시스템보다 더 높으며 자동
FSRA 시스템의 제동력은 즉시 해제되어야 합니다.
운전자가 가속 페달을 제어하는 데 상당한 반응 지연이 없어야 합니다.
자동 제동 상태에서 바퀴의 잠금 시간은 다음을 초과해서는 안 됩니다.
ABS의 허용값. FSRA 시스템은 ABS를 방해하지 않습니다.
체계.
FSRA의 엔진 동력 제어 효과로 인한 휠 슬립 시간
시스템은 견인 제어 시스템의 허용값을 초과해서는 안 됩니다.
FSRA 시스템은 견인력 제어 시스템을 방해하지 않습니다.
FSRA 시스템은 시간 간격을 적절히 조정하여 적응할 수 있습니다.
운전 환경의 변화(예: 악천후). 그러나
조정된 시간 간격은 운전자가 설정한 값보다 낮아서는 안 됩니다.
FSRA 시스템에서 운전자가 원하는 시간 간격을 선택할 수 있는 경우 다음 중 하나를 선택하세요.
다음 방법을 채택한다:
a) FSRA 시스템이 마지막으로 선택된 헤드웨이 값을 계속 저장하는 경우
종료 후 시스템이 다시 활성화되면 시간 간격이 길어집니다.
값은 운전자에게 표시되어야 합니다.
b) FSRA 시스템이 최근 선택된 시간 간격을 저장하지 않는 경우
종료 후 값이 입력되면 시간 간격은 기본값으로 설정됩니다.
값(≥1.5초).
차량에 FSRA 시스템과 기존 시스템이 모두 장착된 경우
크루즈 컨트롤 시스템의 경우 두 시스템 간에 자동 전환이 이루어져서는 안 됩니다.
시스템은...
1분 안에 견적을 받으세요: T/ITS 0002-2014를 클릭하세요
역사적 버전: T/ITS 0002-2014
True-PDF 미리보기 (비어 있으면 다시 로드/스크롤)
T/ITS 0002-2014: 지능형 교통 시스템 - 전속도 범위 적응형 크루즈 제어 시스템 - 성능 요구 사항 및 테스트 절차
티에스 0002-2014
티/잇
지능형 교통 산업 연합
중화인민공화국 표준
ICS 43.020
티 06
지능형 교통 시스템 - 전체 속도 범위
적응형 크루즈 컨트롤 시스템 - 성능
요구 사항 및 테스트 절차
발행일: 2014년 11월 24일
구현일: 2015년 1월 1일
발행처: 중국 지능형 교통 산업 연합
목차
서문 ... 3
서론 ... 4
1 범위 ... 5
2 규범적 참조 ... 5
3 용어 및 정의 ... 6
4 분류 ... 8
5 성능 요구 사항 ... 9
6 성능평가를 위한 테스트 방법 ... 17
부록 A(규범) 관련 기술 설명 ... 24
지능형 교통 시스템 - 전체 속도 범위
적응형 크루즈 컨트롤 시스템 - 성능
요구 사항 및 테스트 절차
1 범위
이 표준은 기본 제어 전략, 최소 기능적 제어를 지정합니다.
요구사항, 기본 상호작용 방법, 진단을 위한 최소 요구사항
그리고 오류에 대한 대응 및 전체 속도에 대한 시스템 성능 테스트 방법
FSRA(Range Adaptive Cruise Control System)의
차량.
FSRA 시스템은 방해받지 않는 도로와 혼잡한 도로 상황에 적합합니다.
고속도로(즉, 비자동차가 통행할 수 없는 도로)에서는
보행자가 지나가는 것을 방지합니다. 이는 대상 차량에 대한 종방향 제어를 제공합니다.
운전. 작업 속도 범위는 0에서 최고 속도 제한까지입니다.
시스템에서 설정할 수 있습니다. 시스템은 대상 차량을 뒤에 주차할 수 있습니다.
감속 능력이 한계 내에 있는 추적식 전진 차량. 그리고 그것은 할 수 있습니다
운전자가 시스템에 운전 계속 명령을 입력한 후 다시 시작합니다.
시스템은 정지 또는 저속으로 이동하는 대상에 반응하지 않습니다.
(GB/T 20608의 적응형 크루즈 컨트롤 시스템 표준과 일치함)
2006).
2 규범적 참조
다음 참조 문서는 적용에 필수적입니다.
이 문서. 날짜가 있는 참조의 경우 인용된 버전만 적용됩니다. 날짜가 없는 참조의 경우
참조, 참조된 문서의 최신 버전(모든 참조 포함)
개정사항)이 적용됩니다.
GB/T 20608-2006, 지능형 교통 시스템 - 적응형 크루즈
제어 시스템 - 성능 요구 사항 및 테스트 절차
JTG B01-2003, 도로 공학 기술 표준
ISO 15623:2013, 운송 정보 및 제어 시스템 - Forward
차량 충돌 경고 시스템 - 성능 요구 사항 및 테스트
절차
ISO 22179:2009, 지능형 교통 시스템 - 전체 속도 범위 적응형
3.6 전방 차량
해당 차량이 있는 도로 앞에 위치한 차량
여행 중이고 같은 방향으로 여행 중입니다
3.7 자유로운 교통 흐름
시동-정지 및 비상 제동 조건, 원활한 흐름 및 무거운
교통
3.8 시간 헤드웨이, THW
동일한 경로를 주행하는 두 차량 사이의 거리를 나타내기 위해 시간을 사용합니다.
경로와 두 차량 사이의 거리를 나누어 계산합니다.
대상 차량의 속도
3.9 속도 설정
운전자 또는 기타 제어 시스템에 의해 설정된 원하는 주행 속도
FSRA 시스템보다
참고: 이 속도는 차량의 제어 하에 있는 예상 최고 속도입니다.
FSRA 시스템.
3.10 정상상태
관련 매개변수가 변경되지 않는 차량의 상태
시간과 거리
3.11 주제 차량
풀 스피드 범위 적응형 크루즈 컨트롤이 장착된 차량
이 표준에서 정의한 시스템
3.12 시스템 상태
시스템 작업의 특정 단계 또는 상태
1) FSRA 해제
어떠한 직접적인 행동도 FSRA 시스템을 발동할 수 없습니다.
2) FSRA 대기
FSRA 시스템은 종단적 통제에 참여하지 않습니다.
차량이지만 운전자가 작동 상태로 전환하도록 트리거할 수 있습니다.
언제든지.
3) FSRA 활성화
5) 보류 상태에서는 자동 주차 제어를 사용하여 보류 상태를 유지합니다.
차량 정지 상태(전자 브레이크 기능을 인수)
ESP).
5.2 기능
5.2.1 제어 모드
거리제어 상태와 속도제어 상태 간의 전환
시스템에 의해 자동으로 완료됩니다.
5.2.2 정지 또는 느리게 움직이는 타겟
시스템은 목표 차량 뒤에 있는 대상 차량을 정지시키려고 시도합니다.
감속 용량. 시스템이 정지 또는 느린 속도에 반응하는지 여부
움직이는 표적의 경우, 본 표준은 의무적인 설계 요구 사항을 제시하지 않습니다.
시스템이 정지 또는 느리게 움직이는 대상에 반응하지 않는 경우,
차량 사용 설명서에 명시되어 있습니다.
5.2.3 차량 추종 능력
차량이 정상 상태로 주행하는 경우 최소 간격은 다음과 같습니다.
차량은 MAX(cmin, τmin×v)로 설정해야 합니다. 과도 상태에서 작동할 때
조건에 따라 허가가 최소 허가보다 일시적으로 낮아질 수 있습니다.
이때 시스템은 자동조정 기능을 갖추어야 한다.
원하는 값으로의 클리어런스.
차량 속도가 8m/s보다 높은 경우, 간격 설정 범위는 다음과 같습니다.
1.5s≤τ≤2.2s. [GB/T 20608-2006, 정의 5.2.2].
최소 요구사항 : 대상 차량이 감속하여 정지하기 시작할 때
정지 속도와 주행 속도를 정지와 같이 시스템이 제어할 수 있습니다.
목표 차량 뒤에 차량을 정지시킵니다.
여기서, cmin은 시스템이 작동 중일 때의 최소 정상 상태 헤드웨이입니다.
다음 제어 모드에서는 전체 속도 범위(홀드 포함) 내에서
상태), 및 cmin≥2m;
τmin은 선택에 사용할 수 있는 최소 정상 상태 시간 간격입니다.
FSRA 제어에 전체 속도 범위(τmin≥1s)에서 사용 가능
v는 대상 차량의 속도이다.
τ는 시간 간격입니다.
정지 = 2.5m/s2;
정지 = 10m/s.
운전자와 FSRA 시스템 모두 엔진 동력 제어(스로틀)를 갖고 있는 경우
입력) 요청 중 더 큰 쪽이 우선합니다. 이를 통해 운전자는
항상 FSRA 시스템보다 엔진 동력 제어를 우선시하십시오.
운전자의 제동 요구량은 FSRA 시스템보다 더 높으며 자동
FSRA 시스템의 제동력은 즉시 해제되어야 합니다.
운전자가 가속 페달을 제어하는 데 상당한 반응 지연이 없어야 합니다.
자동 제동 상태에서 바퀴의 잠금 시간은 다음을 초과해서는 안 됩니다.
ABS의 허용값. FSRA 시스템은 ABS를 방해하지 않습니다.
체계.
FSRA의 엔진 동력 제어 효과로 인한 휠 슬립 시간
시스템은 견인 제어 시스템의 허용값을 초과해서는 안 됩니다.
FSRA 시스템은 견인력 제어 시스템을 방해하지 않습니다.
FSRA 시스템은 시간 간격을 적절히 조정하여 적응할 수 있습니다.
운전 환경의 변화(예: 악천후). 그러나
조정된 시간 간격은 운전자가 설정한 값보다 낮아서는 안 됩니다.
FSRA 시스템에서 운전자가 원하는 시간 간격을 선택할 수 있는 경우 다음 중 하나를 선택하세요.
다음 방법을 채택한다:
a) FSRA 시스템이 마지막으로 선택된 헤드웨이 값을 계속 저장하는 경우
종료 후 시스템이 다시 활성화되면 시간 간격이 길어집니다.
값은 운전자에게 표시되어야 합니다.
b) FSRA 시스템이 최근 선택된 시간 간격을 저장하지 않는 경우
종료 후 값이 입력되면 시간 간격은 기본값으로 설정됩니다.
값(≥1.5초).
차량에 FSRA 시스템과 기존 시스템이 모두 장착된 경우
크루즈 컨트롤 시스템의 경우 두 시스템 간에 자동 전환이 이루어져서는 안 됩니다.
시스템은...
공유하다