1
/
von
12
PayPal, credit cards. Download editable-PDF & invoice in 1 second!
YY/T 1686-2020 Englisch PDF (YYT1686-2020)
YY/T 1686-2020 Englisch PDF (YYT1686-2020)
Normaler Preis
$185.00 USD
Normaler Preis
Verkaufspreis
$185.00 USD
Grundpreis
/
pro
Versand wird beim Checkout berechnet
Verfügbarkeit für Abholungen konnte nicht geladen werden
Lieferung: 3 Sekunden. True-PDF + Rechnung herunterladen.
Erhalten Sie in 1 Minute ein ANGEBOT: Klicken Sie auf YY/T 1686-2020
Historische Versionen: YY/T 1686-2020
Vorschau von True-PDF (Neu laden/Scrollen, wenn leer)
YY/T 1686-2020: Medizinische elektrische Geräte mit Robotertechnologie – Klassifizierung
JJ/T 1686-2020
JJ
PHARMAZEUTISCHER INDUSTRIESTANDARD
DER VOLKSREPUBLIK CHINA
ICS 11.040
C 30
Medizinische elektrische Geräte mit Roboter
Technik - Klassifizierung
AUSGESTELLT AM: 21. FEBRUAR 2020
IMPLEMENTIERT AM: 01. JUNI 2021
Herausgegeben von: National Medical Products Administration
Inhaltsverzeichnis
Vorwort ... 3
1 *Geltungsbereich ... 4
2 Begriffe und Definitionen ... 4
3 * Klassifizierung ... 8
Anhang A (informativ) Prinziperklärung ... 10
Bibliographie ... 12
Medizinische elektrische Geräte mit Roboter
Technik - Klassifizierung
1 *Geltungsbereich
Diese Norm legt Begriffe und Definitionen, die Klassifizierung medizinischer elektrischer
Ausrüstung mit Robotertechnologie (im Folgenden als
Gerät) oder medizinisch-elektrisches System (nachfolgend „System“ genannt).
HINWEIS: Die mit einem Sternchen (*) gekennzeichneten Kapitel und Artikel in dieser Norm enthalten Erläuterungen
Die entsprechenden Grundsätze finden Sie in Anhang A.
2 Begriffe und Definitionen
Für die Zwecke dieses Dokuments gelten die folgenden Begriffe und Definitionen.
2.1 * medizinische elektrische Geräte/Systeme mit Robotertechnologie
medizinisches elektrisches Gerät oder medizinisches elektrisches System, das zwei oder mehr
programmierbare Achsen oder programmierbare kontinuierliche Achsen, und ein gewisses Maß
der Autonomie, medizinisches Personal bei der Durchführung bestimmter Aufgaben zu imitieren, zu unterstützen oder zu ersetzen
HINWEIS 1: Jede Achse wird vom Steuerungssystem gesteuert und koordiniert.
ANMERKUNG 2: Informationen zum Autonomiegrad finden Sie in IEC/TR 60601-4-1.
2.2 Achse
eine Richtungslinie, die verwendet wird, um das Gerät so zu definieren, dass es sich in einer geraden Linie bewegt oder
Drehung
HINWEIS: „Achse“ wird auch im Zusammenhang mit „mechanischen Verbindungen von Geräten“ verwendet.
ANMERKUNG 2: GB/T 12643-2013, Definition 4.3 neu schreiben.
2.3 Medizinische elektrische Geräte
elektrische Geräte, die einen Anwendungsteil haben oder Energie übertragen oder empfangen
an den Patienten oder erkennt diese übertragen oder erhält Energie; solche elektrischen
Ausrüstung:
a) über nicht mehr als einen Anschluss an ein bestimmtes Stromversorgungsnetz verfügt,
Problem mit der Funktion oder Struktur des menschlichen Körpers, wie z. B. schwere Abweichungen oder Verlust
von Funktion oder Struktur
2.9 * Bewegungsfunktion
einschließlich einer oder mehrerer sensorischer, neuromuskulärer oder sportbezogener menschlicher
Funktionen; diese menschlichen Funktionen implementieren die Bewegungssteuerung
HINWEIS: „Sensorisch“, „neuromuskuloskelettal“ und „sportbezogen“ stammen aus dem Welt
Klassifizierung der Körperfunktionen durch die Gesundheitsorganisation (WHO).
2.10 Körperfunktionen
physiologische Funktionen des menschlichen Systems (einschließlich pathologischer Funktionen)
[ISO 9999:2016, Definition 2.4]
2.11 Körperstrukturen
anatomische Teile des menschlichen Körpers wie Organe, Gliedmaßen und deren
Komponenten
[ISO 9999:2016, Definition 2.5]
2.12 * Platzierung
Positionieren, Halten oder Fixieren chirurgischer Instrumente zur Verwendung im
Ausrüstung oder System
2.13 Manipulation
greifen und/oder bewegen in der Regel Objekte mit mehreren Freiheitsgraden, wie zum Beispiel
Gewebe oder chirurgische Instrumente
HINWEIS: Schreiben Sie GB/T 12643-2013, Definition 2.1 neu.
2.14 Master-Slave-Steuerung
eine Steuerungsmethode, die das Gerät oder die System-Slave-Einheit (Slave) reproduziert
die Master-Einheit (Master) Bewegung
HINWEIS: Schreiben Sie GB/T 12643-2013, Definition 5.3.4 neu.
2.15 Kooperative Steuerung
eine Kontrollmethode, bei der das Gerät oder System mit dem Bediener zusammenarbeitet, um
Schließen Sie den Vorgang in seinem Arbeitsbereich ab
2.16 Handgerät
2.24 Gliedmaßen
die Teile des menschlichen Körpers außer Kopf, Hals und Rumpf
2,25 * angetriebenes Exoskelett
medizinische elektrische Geräte, die aus extern mit Strom versorgten elektrischen
Orthesen; sie werden auf die gelähmten oder geschwächten Gliedmaßen des Patienten gelegt, um die
Patient mit Mobilität
2.26 Orthese
Gerät zur externen Verwendung zur Änderung der Struktur und der funktionellen Eigenschaften von
neuromuskuläres System
[GB/T 14191.1-2009, Definition 2.1.2]
2.27 häusliche Gesundheitspflegeumgebung
Wohnsitz des Patienten oder anderer Ort, an dem sich der Patient befindet, ausgenommen
medizinische Einrichtungen, in denen ein ausgebildetes Bedienpersonal anwesend ist, solange der Patient
ist vorhanden
Beispiele: Autos, Busse, Züge, Schiffe oder Flugzeuge, aber auch Rollstühle oder
Umgebungen für Spaziergänge im Freien.
ANMERKUNG 1: Eine medizinische Einrichtung ist eine Einrichtung, die registriert ist und
eine „Medical Institution Practicing License“ gemäß der „Medical Institution
Verwaltungsvorschriften“ und die „Durchführungsbestimmungen der Medizinischen Einrichtung
Verwaltungsreglement“.
HINWEIS 2: Andere Orte, an denen Patienten auftreten, sind Außenbereiche, in denen sie
zu Fuß oder mit dem Auto reisen.
ANMERKUNG 3: IEC 60601-1-11:2015, Definition 3.1, neu schreiben.
3 * Klassifizierung
3.1 Nach dem erwarteten Zweck
3.1.1 Wird zur Unterstützung chirurgischer Eingriffe eingesetzt
3.1.1.1 Nach klinischer Verwendung wird es eingeteilt in: zur Platzierung chirurgischer
Instrumente und Handhabung chirurgischer Instrumente.
3.1.1.2 Nach dem Steuerungsmodus wird zwischen Master-Slave-Steuerung und
kooperative Kontrolle.
Anhang A
(informativ)
Prinziperklärung
A.1 Erklärung des Normnamens
Die standardisierten Objekte, auf die sich dieser Standard bezieht, heißen üblicherweise
Roboter für den medizinischen Einsatz und medizinische Roboter. Es gibt jedoch keine allgemeingültige
anerkannte Definition von „Robotern für medizinische Zwecke“ und „Medizinrobotern“, und es
gibt mehrere Probleme:
- Subjektverlagerung. Nach internationalen Standards sind solche Produkte
medizinische elektrische Geräte oder Systeme, die Robotertechnologie verwenden, nicht
Roboter.
- Unklarer Umfang. Derzeit sind Abgaberoboter und medizinische Serviceroboter
sind auf dem Markt erschienen. Diese Produkte sind völlig inkonsistent
mit den Verwaltungsabteilungen, Produktrisikostellen und
Implementierungsstandards für medizinische elektrische Geräte, und es ist schwierig
um sie zu verwirren.
- Nach den „Regeln für die Benennung gebräuchlicher Namen medizinischer
Geräte", Medizinprodukte des gleichen Typs mit gleichen oder ähnlichen
vorgesehenen Zweck und gemeinsamer Technologie müssen dieselben gemeinsamen
Name. Aber der Verwendungszweck medizinischer elektrischer Geräte oder Systeme
Der Einsatz von Robotern ist sehr breit gefächert und umfasst die Verwendung zur Operationsassistenz,
Rehabilitation, Entschädigung. Es ist nicht wissenschaftlich, einen generischen Namen zu verwenden, um
deckt nicht alle erwarteten Zwecke ab und erfüllt auch nicht die Anforderungen der medizinischen
Gerätevorschriften und Anforderungen zur Registrierungsprüfung.
Inspiriert durch die Bestimmungen der US-amerikanischen Food and Drug Administration (FDA)
und internationale Normen, der Name des Standardisierungsobjekts, auf das
diese Norm gilt als medizinisches elektrisches Gerät oder
System, das Robotik verwendet. Der Name ist kein allgemeiner Name für diese Art von
Produkt. Es klärt das Thema dieser Art von Produkt. Gleichzeitig
verdeutlicht die technischen Merkmale dieser Produktart, die sie auszeichnen
von anderen medizinischen elektrischen Geräten oder Systemen. Für Produkte dieser Art
mit unterschiedlichen erwarteten Zwecken wird der spezifische allgemeine Name bestimmt
entsprechend den Vorgaben der Namensregeln.
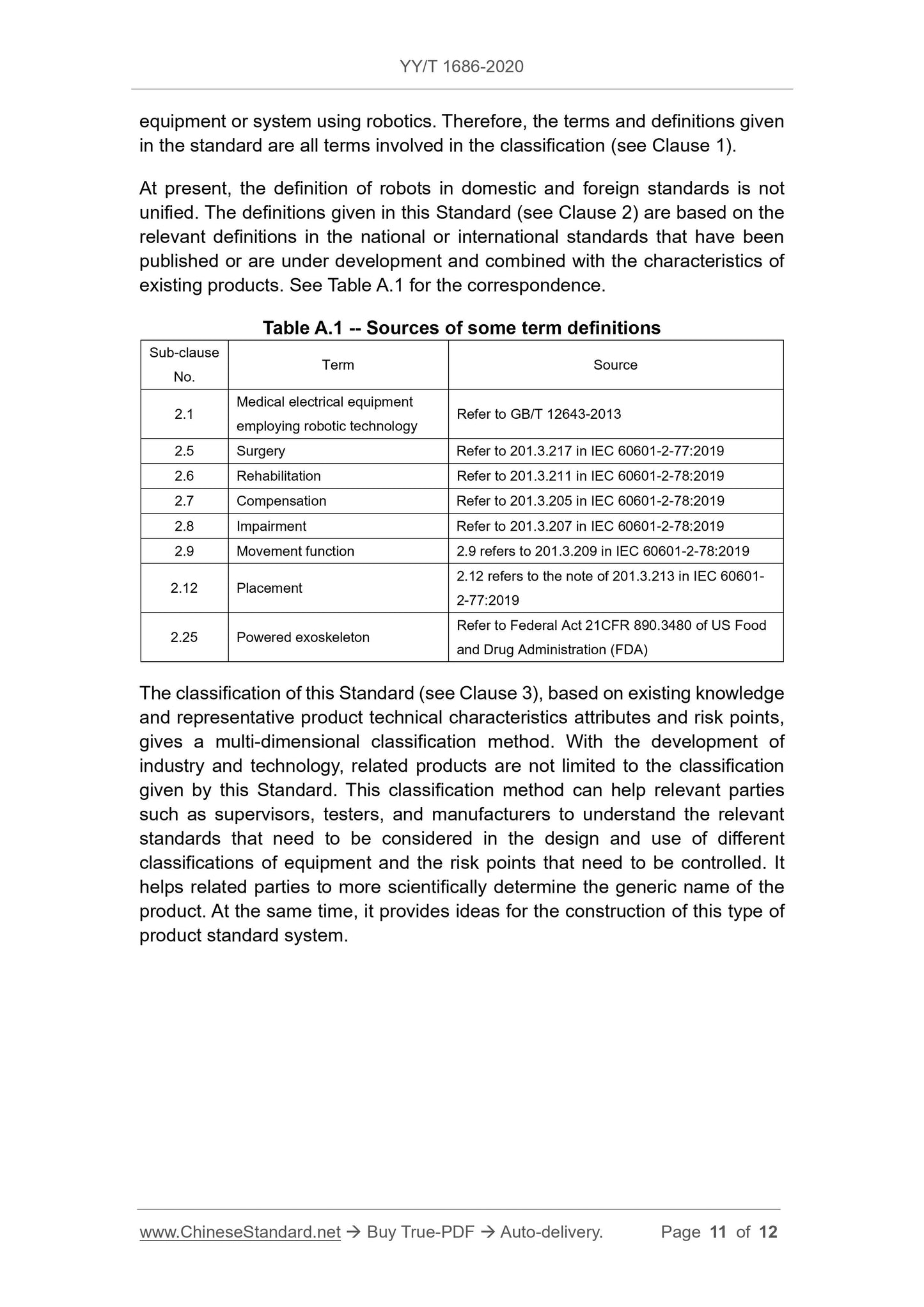
A.2 Grundsätzliche Erläuterung der besonderen Kapitel und Abschnitte
Dieser Standard konzentriert sich auf die wissenschaftliche Klassifizierung von medizinischen elektrischen
Erhalten Sie in 1 Minute ein ANGEBOT: Klicken Sie auf YY/T 1686-2020
Historische Versionen: YY/T 1686-2020
Vorschau von True-PDF (Neu laden/Scrollen, wenn leer)
YY/T 1686-2020: Medizinische elektrische Geräte mit Robotertechnologie – Klassifizierung
JJ/T 1686-2020
JJ
PHARMAZEUTISCHER INDUSTRIESTANDARD
DER VOLKSREPUBLIK CHINA
ICS 11.040
C 30
Medizinische elektrische Geräte mit Roboter
Technik - Klassifizierung
AUSGESTELLT AM: 21. FEBRUAR 2020
IMPLEMENTIERT AM: 01. JUNI 2021
Herausgegeben von: National Medical Products Administration
Inhaltsverzeichnis
Vorwort ... 3
1 *Geltungsbereich ... 4
2 Begriffe und Definitionen ... 4
3 * Klassifizierung ... 8
Anhang A (informativ) Prinziperklärung ... 10
Bibliographie ... 12
Medizinische elektrische Geräte mit Roboter
Technik - Klassifizierung
1 *Geltungsbereich
Diese Norm legt Begriffe und Definitionen, die Klassifizierung medizinischer elektrischer
Ausrüstung mit Robotertechnologie (im Folgenden als
Gerät) oder medizinisch-elektrisches System (nachfolgend „System“ genannt).
HINWEIS: Die mit einem Sternchen (*) gekennzeichneten Kapitel und Artikel in dieser Norm enthalten Erläuterungen
Die entsprechenden Grundsätze finden Sie in Anhang A.
2 Begriffe und Definitionen
Für die Zwecke dieses Dokuments gelten die folgenden Begriffe und Definitionen.
2.1 * medizinische elektrische Geräte/Systeme mit Robotertechnologie
medizinisches elektrisches Gerät oder medizinisches elektrisches System, das zwei oder mehr
programmierbare Achsen oder programmierbare kontinuierliche Achsen, und ein gewisses Maß
der Autonomie, medizinisches Personal bei der Durchführung bestimmter Aufgaben zu imitieren, zu unterstützen oder zu ersetzen
HINWEIS 1: Jede Achse wird vom Steuerungssystem gesteuert und koordiniert.
ANMERKUNG 2: Informationen zum Autonomiegrad finden Sie in IEC/TR 60601-4-1.
2.2 Achse
eine Richtungslinie, die verwendet wird, um das Gerät so zu definieren, dass es sich in einer geraden Linie bewegt oder
Drehung
HINWEIS: „Achse“ wird auch im Zusammenhang mit „mechanischen Verbindungen von Geräten“ verwendet.
ANMERKUNG 2: GB/T 12643-2013, Definition 4.3 neu schreiben.
2.3 Medizinische elektrische Geräte
elektrische Geräte, die einen Anwendungsteil haben oder Energie übertragen oder empfangen
an den Patienten oder erkennt diese übertragen oder erhält Energie; solche elektrischen
Ausrüstung:
a) über nicht mehr als einen Anschluss an ein bestimmtes Stromversorgungsnetz verfügt,
Problem mit der Funktion oder Struktur des menschlichen Körpers, wie z. B. schwere Abweichungen oder Verlust
von Funktion oder Struktur
2.9 * Bewegungsfunktion
einschließlich einer oder mehrerer sensorischer, neuromuskulärer oder sportbezogener menschlicher
Funktionen; diese menschlichen Funktionen implementieren die Bewegungssteuerung
HINWEIS: „Sensorisch“, „neuromuskuloskelettal“ und „sportbezogen“ stammen aus dem Welt
Klassifizierung der Körperfunktionen durch die Gesundheitsorganisation (WHO).
2.10 Körperfunktionen
physiologische Funktionen des menschlichen Systems (einschließlich pathologischer Funktionen)
[ISO 9999:2016, Definition 2.4]
2.11 Körperstrukturen
anatomische Teile des menschlichen Körpers wie Organe, Gliedmaßen und deren
Komponenten
[ISO 9999:2016, Definition 2.5]
2.12 * Platzierung
Positionieren, Halten oder Fixieren chirurgischer Instrumente zur Verwendung im
Ausrüstung oder System
2.13 Manipulation
greifen und/oder bewegen in der Regel Objekte mit mehreren Freiheitsgraden, wie zum Beispiel
Gewebe oder chirurgische Instrumente
HINWEIS: Schreiben Sie GB/T 12643-2013, Definition 2.1 neu.
2.14 Master-Slave-Steuerung
eine Steuerungsmethode, die das Gerät oder die System-Slave-Einheit (Slave) reproduziert
die Master-Einheit (Master) Bewegung
HINWEIS: Schreiben Sie GB/T 12643-2013, Definition 5.3.4 neu.
2.15 Kooperative Steuerung
eine Kontrollmethode, bei der das Gerät oder System mit dem Bediener zusammenarbeitet, um
Schließen Sie den Vorgang in seinem Arbeitsbereich ab
2.16 Handgerät
2.24 Gliedmaßen
die Teile des menschlichen Körpers außer Kopf, Hals und Rumpf
2,25 * angetriebenes Exoskelett
medizinische elektrische Geräte, die aus extern mit Strom versorgten elektrischen
Orthesen; sie werden auf die gelähmten oder geschwächten Gliedmaßen des Patienten gelegt, um die
Patient mit Mobilität
2.26 Orthese
Gerät zur externen Verwendung zur Änderung der Struktur und der funktionellen Eigenschaften von
neuromuskuläres System
[GB/T 14191.1-2009, Definition 2.1.2]
2.27 häusliche Gesundheitspflegeumgebung
Wohnsitz des Patienten oder anderer Ort, an dem sich der Patient befindet, ausgenommen
medizinische Einrichtungen, in denen ein ausgebildetes Bedienpersonal anwesend ist, solange der Patient
ist vorhanden
Beispiele: Autos, Busse, Züge, Schiffe oder Flugzeuge, aber auch Rollstühle oder
Umgebungen für Spaziergänge im Freien.
ANMERKUNG 1: Eine medizinische Einrichtung ist eine Einrichtung, die registriert ist und
eine „Medical Institution Practicing License“ gemäß der „Medical Institution
Verwaltungsvorschriften“ und die „Durchführungsbestimmungen der Medizinischen Einrichtung
Verwaltungsreglement“.
HINWEIS 2: Andere Orte, an denen Patienten auftreten, sind Außenbereiche, in denen sie
zu Fuß oder mit dem Auto reisen.
ANMERKUNG 3: IEC 60601-1-11:2015, Definition 3.1, neu schreiben.
3 * Klassifizierung
3.1 Nach dem erwarteten Zweck
3.1.1 Wird zur Unterstützung chirurgischer Eingriffe eingesetzt
3.1.1.1 Nach klinischer Verwendung wird es eingeteilt in: zur Platzierung chirurgischer
Instrumente und Handhabung chirurgischer Instrumente.
3.1.1.2 Nach dem Steuerungsmodus wird zwischen Master-Slave-Steuerung und
kooperative Kontrolle.
Anhang A
(informativ)
Prinziperklärung
A.1 Erklärung des Normnamens
Die standardisierten Objekte, auf die sich dieser Standard bezieht, heißen üblicherweise
Roboter für den medizinischen Einsatz und medizinische Roboter. Es gibt jedoch keine allgemeingültige
anerkannte Definition von „Robotern für medizinische Zwecke“ und „Medizinrobotern“, und es
gibt mehrere Probleme:
- Subjektverlagerung. Nach internationalen Standards sind solche Produkte
medizinische elektrische Geräte oder Systeme, die Robotertechnologie verwenden, nicht
Roboter.
- Unklarer Umfang. Derzeit sind Abgaberoboter und medizinische Serviceroboter
sind auf dem Markt erschienen. Diese Produkte sind völlig inkonsistent
mit den Verwaltungsabteilungen, Produktrisikostellen und
Implementierungsstandards für medizinische elektrische Geräte, und es ist schwierig
um sie zu verwirren.
- Nach den „Regeln für die Benennung gebräuchlicher Namen medizinischer
Geräte", Medizinprodukte des gleichen Typs mit gleichen oder ähnlichen
vorgesehenen Zweck und gemeinsamer Technologie müssen dieselben gemeinsamen
Name. Aber der Verwendungszweck medizinischer elektrischer Geräte oder Systeme
Der Einsatz von Robotern ist sehr breit gefächert und umfasst die Verwendung zur Operationsassistenz,
Rehabilitation, Entschädigung. Es ist nicht wissenschaftlich, einen generischen Namen zu verwenden, um
deckt nicht alle erwarteten Zwecke ab und erfüllt auch nicht die Anforderungen der medizinischen
Gerätevorschriften und Anforderungen zur Registrierungsprüfung.
Inspiriert durch die Bestimmungen der US-amerikanischen Food and Drug Administration (FDA)
und internationale Normen, der Name des Standardisierungsobjekts, auf das
diese Norm gilt als medizinisches elektrisches Gerät oder
System, das Robotik verwendet. Der Name ist kein allgemeiner Name für diese Art von
Produkt. Es klärt das Thema dieser Art von Produkt. Gleichzeitig
verdeutlicht die technischen Merkmale dieser Produktart, die sie auszeichnen
von anderen medizinischen elektrischen Geräten oder Systemen. Für Produkte dieser Art
mit unterschiedlichen erwarteten Zwecken wird der spezifische allgemeine Name bestimmt
entsprechend den Vorgaben der Namensregeln.
A.2 Grundsätzliche Erläuterung der besonderen Kapitel und Abschnitte
Dieser Standard konzentriert sich auf die wissenschaftliche Klassifizierung von medizinischen elektrischen
Aktie