1
/
von
12
PayPal, credit cards. Download editable-PDF & invoice in 1 second!
YY/T 1712-2021 Englisch PDF (YYT1712-2021)
YY/T 1712-2021 Englisch PDF (YYT1712-2021)
Normaler Preis
$350.00 USD
Normaler Preis
Verkaufspreis
$350.00 USD
Grundpreis
/
pro
Versand wird beim Checkout berechnet
Verfügbarkeit für Abholungen konnte nicht geladen werden
Lieferung: 3 Sekunden. True-PDF + Rechnung herunterladen.
Erhalten Sie in 1 Minute ein ANGEBOT: Klicken Sie auf YY/T 1712-2021
Historische Versionen: YY/T 1712-2021
Vorschau von True-PDF (Neu laden/Scrollen, wenn leer)
YY/T 1712-2021: Medizinische Geräte und Systeme für assistierte chirurgische Eingriffe unter Einsatz von Robotertechnologie
JJ/T 1712-2021
JJ
PHARMAZEUTISCHER INDUSTRIESTANDARD
DER VOLKSREPUBLIK CHINA
ICS 11.040
C 39
Unterstützte chirurgische Geräte und unterstützte
chirurgisches medizinisches System mit Roboter
Technologie
AUSGESTELLT AM: 09. MÄRZ 2021
IMPLEMENTIERT AM: 01. OKTOBER 2022
Herausgegeben von: National Medical Products Administration
Inhaltsverzeichnis
Vorwort ... 3
Einführung ... 4
1 Geltungsbereich ... 5
2 Normative Verweisungen ... 5
3 Begriffe und Definitionen ... 6
4 Anforderungen ... 10
4.1 Arbeitsbedingungen ... 10
4.2 Master-Slave-Steuerung Genauigkeit der RA-Ausrüstung ... 10
4.3 Genauigkeit der Positionierung von RA-Geräten unter Navigationsführung ... 11
4.4 Maximaler Platz und effektive Arbeitsfläche ... 12
4.5 Tragfähigkeit des Roboterarms ... 12
4.6 Zeitverzögerung der Master-Slave-Steuerung ... 12
4.7 Umweltprüfungen... 12
4.8 Sicherheitsanforderungen ... 13
5 Prüfmethoden ... 14
5.1 Bedingungen der Arbeitsumgebung ... 14
5.2 Master-Slave-Steuerung Genauigkeit der RA-Ausrüstung ... 14
5.3 Genauigkeit der Positionierung von RA-Geräten unter Navigationsführung ... 24
5.4 Maximaler Platz und effektive Arbeitsfläche ... 27
5.5 Mechanische Belastbarkeit ... 29
5.6 Zeitverzögerung der Master-Slave-Steuerung ... 30
5.7 Umweltprüfungen... 32
5.8 Sicherheitsanforderungen ... 32
Unterstützte chirurgische Geräte und unterstützte
chirurgisches medizinisches System mit Roboter
Technologie
1 Geltungsbereich
Diese Norm legt die Begriffe, Anforderungen und Prüfverfahren fest.
Methoden für assistierte chirurgische medizinische Geräte und assistierte chirurgische medizinische
System mit Robotertechnologie.
Diese Norm gilt für assistierte chirurgische medizinische Geräte und assistierte
chirurgisches medizinisches System mit Robotertechnologie (im Folgenden
als „RA-Ausrüstung“).
2 Normative Verweisungen
Für die Anwendung dieses Dokuments sind folgende Unterlagen unabdingbar:
Bei datierten Verweisungen gilt für dieses Dokument ausschließlich die datierte Fassung.
undatierte Verweisungen, gilt die neueste Ausgabe (einschließlich aller Änderungen) für diese
dokumentieren.
GB 9706.1, Medizinische elektrische Geräte - Teil 1: Allgemeine Anforderungen für
Grundlegende Sicherheit und wesentliche Leistung
GB/T 12642, Industrieroboter – Leistungskriterien und zugehörige Tests
Methoden
GB/T 12643, Roboter und Robotergeräte - Wortschatz
GB/T 14710, Umweltanforderungen und Prüfverfahren für medizinische
Elektrische Ausrüstung
YY/T 0043, Medizinische Nahtnadel
YY 0167, Nicht resorbierbares chirurgisches Nahtmaterial
YY/T 1686, Medizinische elektrische Geräte mit Robotertechnologie -
Einstufung
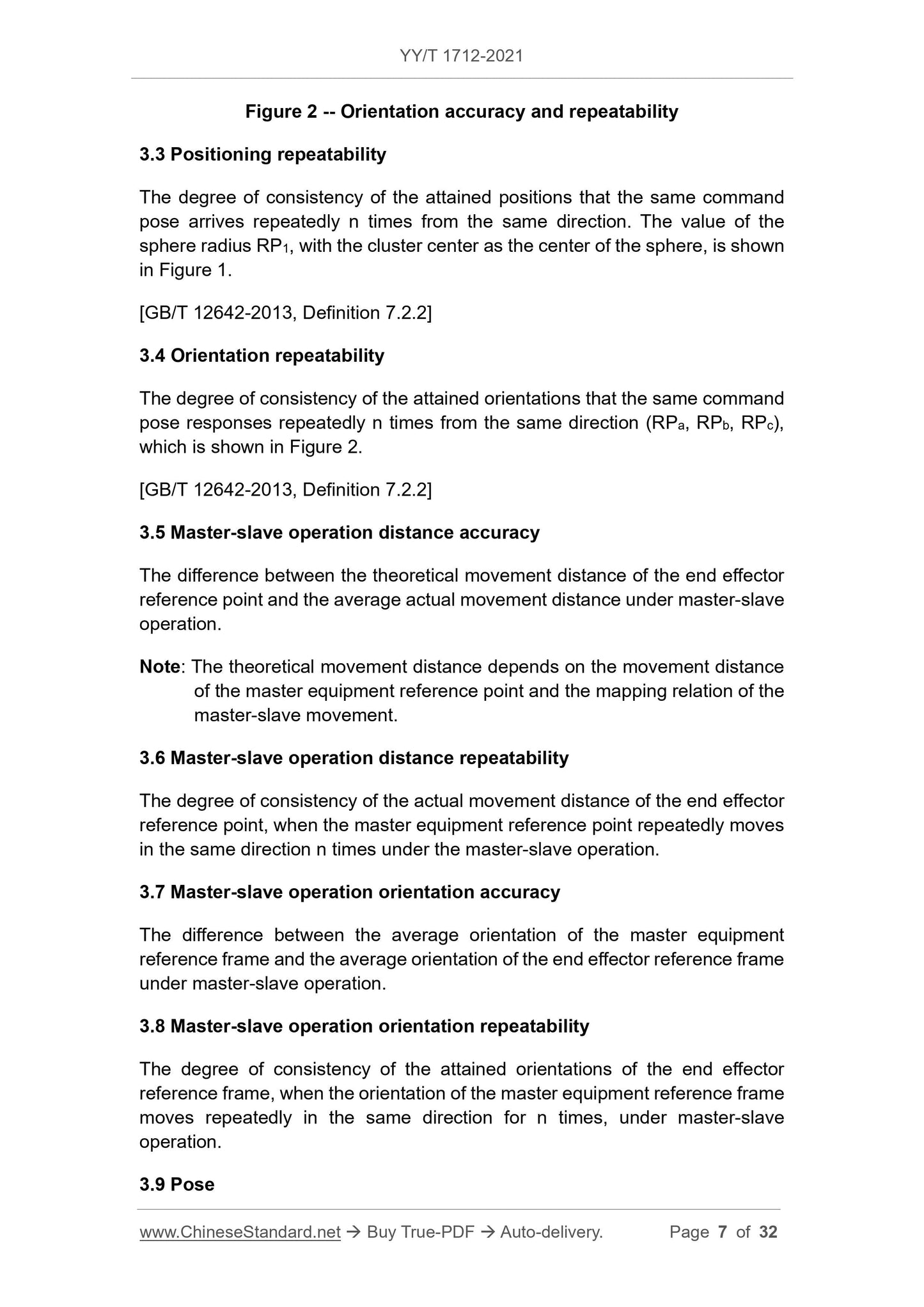
Abbildung 2 - Orientierungsgenauigkeit und Wiederholbarkeit
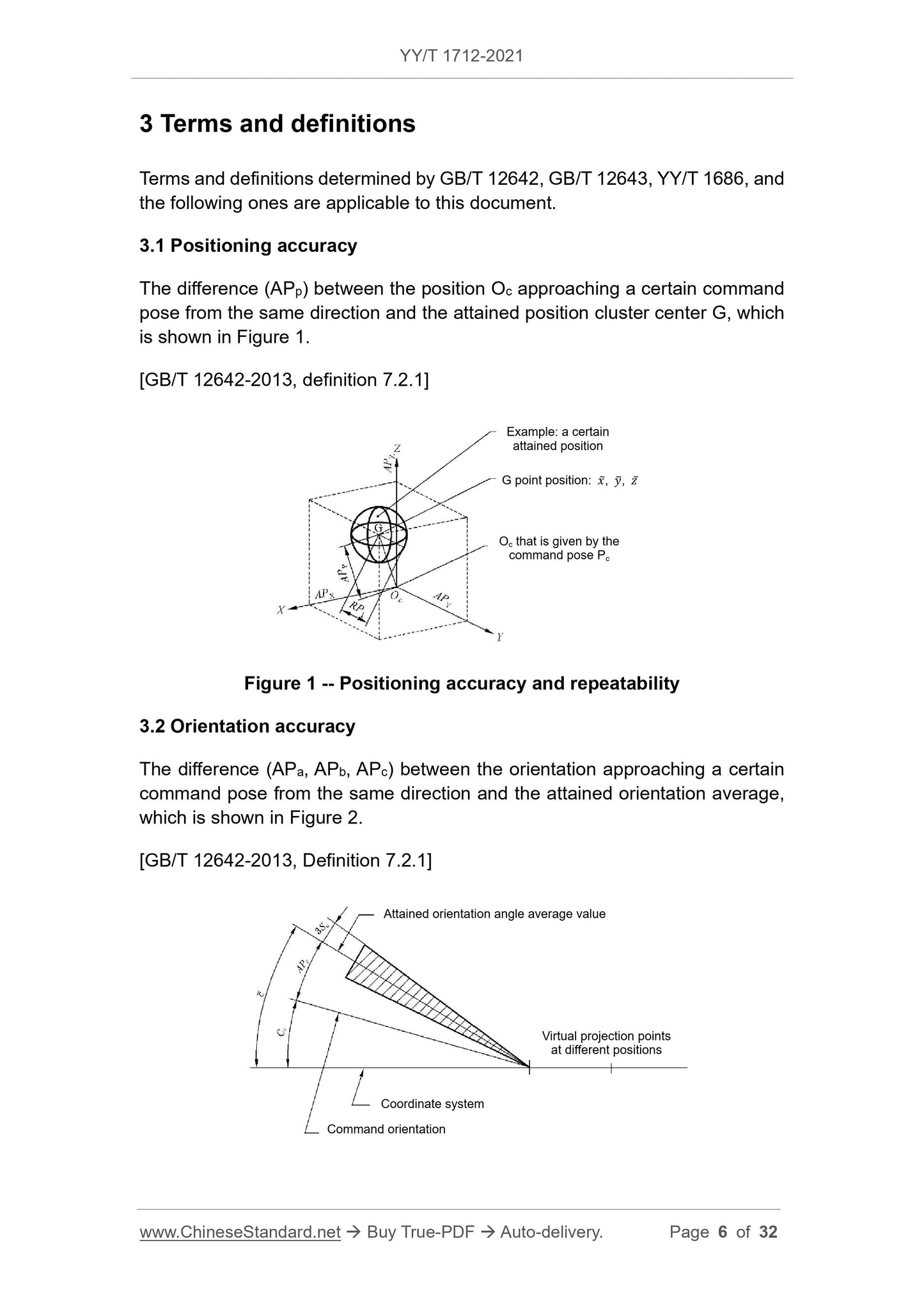
3.3 Wiederholgenauigkeit der Positionierung
Der Grad der Konsistenz der erreichten Positionen, die derselbe Befehl
Pose kommt n-mal aus der gleichen Richtung. Der Wert der
Der Kugelradius RP1, mit dem Clusterzentrum als Kugelmittelpunkt, wird angezeigt
in Abbildung 1.
[GB/T 12642-2013, Definition 7.2.2]
3.4 Wiederholgenauigkeit der Orientierung
Der Grad der Konsistenz der erreichten Orientierungen, die derselbe Befehl
Antworten n-mal aus derselben Richtung stellen (RPa, RPb, RPc),
welches in Abbildung 2 dargestellt ist.
[GB/T 12642-2013, Definition 7.2.2]
3.5 Distanzgenauigkeit im Master-Slave-Betrieb
Der Unterschied zwischen der theoretischen Bewegungsdistanz des Endeffektors
Referenzpunkt und die durchschnittliche tatsächliche Bewegungsstrecke unter Master-Slave
Betrieb.
Hinweis: Die theoretische Bewegungsdistanz ist abhängig von der Bewegungsdistanz
des Master-Equipment-Referenzpunktes und der Abbildungsrelation des
Master-Slave-Bewegung.
3.6 Wiederholgenauigkeit der Master-Slave-Abstände
Der Grad der Übereinstimmung der tatsächlichen Bewegungsstrecke des Endeffektors
Referenzpunkt, wenn der Referenzpunkt des Master-Geräts wiederholt verschoben wird
in die gleiche Richtung n-mal im Master-Slave-Betrieb.
3.7 Orientierungsgenauigkeit im Master-Slave-Betrieb
Der Unterschied zwischen der durchschnittlichen Ausrichtung des Master-Equipments
Referenzrahmen und die durchschnittliche Orientierung des Endeffektor-Referenzrahmens
im Master-Slave-Betrieb.
3.8 Wiederholgenauigkeit der Master-Slave-Betriebsorientierung
Der Grad der Konsistenz der erreichten Orientierungen des Endeffektors
Referenzrahmen, wenn die Orientierung des Master-Gerätereferenzrahmens
bewegt sich n-mal wiederholt in die gleiche Richtung, unter Master-Slave
Betrieb.
3.9 Haltung
3.17 Endeffektor
Die Ausrüstung, die an der mechanischen Schnittstelle für die RA-Ausrüstung installiert ist
um seine chirurgischen Aufgaben zu erfüllen.
3.18 Endeffektor-Referenzpunkt
Der Referenzpunkt, der für einen bestimmten Zweck am Endeffektor gesetzt wird. Im
Der geometrische Mittelpunkt der letzten Gelenkachse des Endeffektors liegt im Allgemeinen
als Bezugspunkt für die Messung verwendet.
[GB/T 12643-2013/ISO 8373:2012, Definition 4.9]
3.19 Endeffektor-Referenzrahmen
Der Referenzrahmen, der für einen bestimmten Zweck am Endeffektor festgelegt wird. Während
Beim Test wird er im Allgemeinen am Referenzpunkt des Endeffektors definiert.
3.20 Referenzpunkt des Master-Equipments
Der Referenzpunkt, der auf dem Master-Gerät gesetzt wird, um die
Informationen über die Handoperation des Arztes während der Operation. Während des Tests,
der Schnittpunkt mehrerer Gelenkachsen am Ende des Master-Equipments ist
Wird im Allgemeinen als Bezugspunkt für die Messung verwendet.
3.21 Referenzrahmen für Master-Geräte
Der Referenzrahmen, der auf dem Master-Gerät eingestellt wird, um die
Informationen über die Handoperation des Arztes während der Operation. Während des Tests,
er wird grundsätzlich am Bezugspunkt des Master-Equipments definiert.
3.22 Mechanische Schnittstelle
Das Bauteil auf der Montagefläche des RA-Gerätes, das
zum Anschluss von abnehmbaren Zubehörteilen und Komponenten oder wird über die RA bedient
Bewegung der Ausrüstung.
Hinweis 1: Die mechanische Schnittstelle kann zum Anbringen steriler Gegenstände verwendet werden.
Hinweis 2: Die mechanische Schnittstelle kann Isolierung und andere Funktionen bieten
(wie etwa aseptische Grenzen), um grundlegende Sicherheitsanforderungen zu erfüllen.
Hinweis 3: Die RA-Ausrüstung kann keine, eine oder mehrere mechanische Schnittstellen haben.
Hinweis: Schreiben Sie IEC 80601-2-77 neu.
3.23 Master-Slave-Steuerung
Die Wiederholgenauigkeit der Positionierung muss den Herstellervorgaben in der
Begleitdokumente.
4.2.1.4 Wiederholgenauigkeit der Orientierung
Die Wiederholgenauigkeit der Orientierung muss den Vorschriften des Herstellers in der
Begleitdokumente.
4.2.2 Master-Slave-Betriebsgenauigkeit und Master-Slave-Betrieb
Wiederholgenauigkeit
4.2.2.1 Distanzgenauigkeit im Master-Slave-Betrieb
Die Genauigkeit der Master-Slave-Betriebsentfernung muss den Herstellerangaben entsprechen.
Vorschriften in den Begleitdokumenten.
4.2.2.2 Wiederholgenauigkeit der Master-Slave-Betriebsentfernung
Die Wiederholgenauigkeit der Master-Slave-Abstände muss den
Herstellervorschriften in den Begleitpapieren.
4.2.2.3 Orientierungsgenauigkeit im Master-Slave-Betrieb
Die Orientierungsgenauigkeit im Master-Slave-Betrieb muss den Herstellerangaben entsprechen.
Vorschriften in den Begleitdokumenten.
4.2.2.4 Wiederholgenauigkeit der Master-Slave-Betriebsorientierung
Die Wiederholgenauigkeit der Master-Slave-Betriebsorientierung muss den
Herstellervorschriften in den Begleitpapieren.
4.3 Genauigkeit der Positionierung von RA-Geräten unter Navigationsführung
4.3.1 Genauigkeit der Positionierung von RA-Geräten unter Navigationsführung
Die Positioniergenauigkeit muss den Herstellervorgaben in der
Begleitdokumente.
4.3.2 Positionierung der RA-Ausrüstung ...
Erhalten Sie in 1 Minute ein ANGEBOT: Klicken Sie auf YY/T 1712-2021
Historische Versionen: YY/T 1712-2021
Vorschau von True-PDF (Neu laden/Scrollen, wenn leer)
YY/T 1712-2021: Medizinische Geräte und Systeme für assistierte chirurgische Eingriffe unter Einsatz von Robotertechnologie
JJ/T 1712-2021
JJ
PHARMAZEUTISCHER INDUSTRIESTANDARD
DER VOLKSREPUBLIK CHINA
ICS 11.040
C 39
Unterstützte chirurgische Geräte und unterstützte
chirurgisches medizinisches System mit Roboter
Technologie
AUSGESTELLT AM: 09. MÄRZ 2021
IMPLEMENTIERT AM: 01. OKTOBER 2022
Herausgegeben von: National Medical Products Administration
Inhaltsverzeichnis
Vorwort ... 3
Einführung ... 4
1 Geltungsbereich ... 5
2 Normative Verweisungen ... 5
3 Begriffe und Definitionen ... 6
4 Anforderungen ... 10
4.1 Arbeitsbedingungen ... 10
4.2 Master-Slave-Steuerung Genauigkeit der RA-Ausrüstung ... 10
4.3 Genauigkeit der Positionierung von RA-Geräten unter Navigationsführung ... 11
4.4 Maximaler Platz und effektive Arbeitsfläche ... 12
4.5 Tragfähigkeit des Roboterarms ... 12
4.6 Zeitverzögerung der Master-Slave-Steuerung ... 12
4.7 Umweltprüfungen... 12
4.8 Sicherheitsanforderungen ... 13
5 Prüfmethoden ... 14
5.1 Bedingungen der Arbeitsumgebung ... 14
5.2 Master-Slave-Steuerung Genauigkeit der RA-Ausrüstung ... 14
5.3 Genauigkeit der Positionierung von RA-Geräten unter Navigationsführung ... 24
5.4 Maximaler Platz und effektive Arbeitsfläche ... 27
5.5 Mechanische Belastbarkeit ... 29
5.6 Zeitverzögerung der Master-Slave-Steuerung ... 30
5.7 Umweltprüfungen... 32
5.8 Sicherheitsanforderungen ... 32
Unterstützte chirurgische Geräte und unterstützte
chirurgisches medizinisches System mit Roboter
Technologie
1 Geltungsbereich
Diese Norm legt die Begriffe, Anforderungen und Prüfverfahren fest.
Methoden für assistierte chirurgische medizinische Geräte und assistierte chirurgische medizinische
System mit Robotertechnologie.
Diese Norm gilt für assistierte chirurgische medizinische Geräte und assistierte
chirurgisches medizinisches System mit Robotertechnologie (im Folgenden
als „RA-Ausrüstung“).
2 Normative Verweisungen
Für die Anwendung dieses Dokuments sind folgende Unterlagen unabdingbar:
Bei datierten Verweisungen gilt für dieses Dokument ausschließlich die datierte Fassung.
undatierte Verweisungen, gilt die neueste Ausgabe (einschließlich aller Änderungen) für diese
dokumentieren.
GB 9706.1, Medizinische elektrische Geräte - Teil 1: Allgemeine Anforderungen für
Grundlegende Sicherheit und wesentliche Leistung
GB/T 12642, Industrieroboter – Leistungskriterien und zugehörige Tests
Methoden
GB/T 12643, Roboter und Robotergeräte - Wortschatz
GB/T 14710, Umweltanforderungen und Prüfverfahren für medizinische
Elektrische Ausrüstung
YY/T 0043, Medizinische Nahtnadel
YY 0167, Nicht resorbierbares chirurgisches Nahtmaterial
YY/T 1686, Medizinische elektrische Geräte mit Robotertechnologie -
Einstufung
Abbildung 2 - Orientierungsgenauigkeit und Wiederholbarkeit
3.3 Wiederholgenauigkeit der Positionierung
Der Grad der Konsistenz der erreichten Positionen, die derselbe Befehl
Pose kommt n-mal aus der gleichen Richtung. Der Wert der
Der Kugelradius RP1, mit dem Clusterzentrum als Kugelmittelpunkt, wird angezeigt
in Abbildung 1.
[GB/T 12642-2013, Definition 7.2.2]
3.4 Wiederholgenauigkeit der Orientierung
Der Grad der Konsistenz der erreichten Orientierungen, die derselbe Befehl
Antworten n-mal aus derselben Richtung stellen (RPa, RPb, RPc),
welches in Abbildung 2 dargestellt ist.
[GB/T 12642-2013, Definition 7.2.2]
3.5 Distanzgenauigkeit im Master-Slave-Betrieb
Der Unterschied zwischen der theoretischen Bewegungsdistanz des Endeffektors
Referenzpunkt und die durchschnittliche tatsächliche Bewegungsstrecke unter Master-Slave
Betrieb.
Hinweis: Die theoretische Bewegungsdistanz ist abhängig von der Bewegungsdistanz
des Master-Equipment-Referenzpunktes und der Abbildungsrelation des
Master-Slave-Bewegung.
3.6 Wiederholgenauigkeit der Master-Slave-Abstände
Der Grad der Übereinstimmung der tatsächlichen Bewegungsstrecke des Endeffektors
Referenzpunkt, wenn der Referenzpunkt des Master-Geräts wiederholt verschoben wird
in die gleiche Richtung n-mal im Master-Slave-Betrieb.
3.7 Orientierungsgenauigkeit im Master-Slave-Betrieb
Der Unterschied zwischen der durchschnittlichen Ausrichtung des Master-Equipments
Referenzrahmen und die durchschnittliche Orientierung des Endeffektor-Referenzrahmens
im Master-Slave-Betrieb.
3.8 Wiederholgenauigkeit der Master-Slave-Betriebsorientierung
Der Grad der Konsistenz der erreichten Orientierungen des Endeffektors
Referenzrahmen, wenn die Orientierung des Master-Gerätereferenzrahmens
bewegt sich n-mal wiederholt in die gleiche Richtung, unter Master-Slave
Betrieb.
3.9 Haltung
3.17 Endeffektor
Die Ausrüstung, die an der mechanischen Schnittstelle für die RA-Ausrüstung installiert ist
um seine chirurgischen Aufgaben zu erfüllen.
3.18 Endeffektor-Referenzpunkt
Der Referenzpunkt, der für einen bestimmten Zweck am Endeffektor gesetzt wird. Im
Der geometrische Mittelpunkt der letzten Gelenkachse des Endeffektors liegt im Allgemeinen
als Bezugspunkt für die Messung verwendet.
[GB/T 12643-2013/ISO 8373:2012, Definition 4.9]
3.19 Endeffektor-Referenzrahmen
Der Referenzrahmen, der für einen bestimmten Zweck am Endeffektor festgelegt wird. Während
Beim Test wird er im Allgemeinen am Referenzpunkt des Endeffektors definiert.
3.20 Referenzpunkt des Master-Equipments
Der Referenzpunkt, der auf dem Master-Gerät gesetzt wird, um die
Informationen über die Handoperation des Arztes während der Operation. Während des Tests,
der Schnittpunkt mehrerer Gelenkachsen am Ende des Master-Equipments ist
Wird im Allgemeinen als Bezugspunkt für die Messung verwendet.
3.21 Referenzrahmen für Master-Geräte
Der Referenzrahmen, der auf dem Master-Gerät eingestellt wird, um die
Informationen über die Handoperation des Arztes während der Operation. Während des Tests,
er wird grundsätzlich am Bezugspunkt des Master-Equipments definiert.
3.22 Mechanische Schnittstelle
Das Bauteil auf der Montagefläche des RA-Gerätes, das
zum Anschluss von abnehmbaren Zubehörteilen und Komponenten oder wird über die RA bedient
Bewegung der Ausrüstung.
Hinweis 1: Die mechanische Schnittstelle kann zum Anbringen steriler Gegenstände verwendet werden.
Hinweis 2: Die mechanische Schnittstelle kann Isolierung und andere Funktionen bieten
(wie etwa aseptische Grenzen), um grundlegende Sicherheitsanforderungen zu erfüllen.
Hinweis 3: Die RA-Ausrüstung kann keine, eine oder mehrere mechanische Schnittstellen haben.
Hinweis: Schreiben Sie IEC 80601-2-77 neu.
3.23 Master-Slave-Steuerung
Die Wiederholgenauigkeit der Positionierung muss den Herstellervorgaben in der
Begleitdokumente.
4.2.1.4 Wiederholgenauigkeit der Orientierung
Die Wiederholgenauigkeit der Orientierung muss den Vorschriften des Herstellers in der
Begleitdokumente.
4.2.2 Master-Slave-Betriebsgenauigkeit und Master-Slave-Betrieb
Wiederholgenauigkeit
4.2.2.1 Distanzgenauigkeit im Master-Slave-Betrieb
Die Genauigkeit der Master-Slave-Betriebsentfernung muss den Herstellerangaben entsprechen.
Vorschriften in den Begleitdokumenten.
4.2.2.2 Wiederholgenauigkeit der Master-Slave-Betriebsentfernung
Die Wiederholgenauigkeit der Master-Slave-Abstände muss den
Herstellervorschriften in den Begleitpapieren.
4.2.2.3 Orientierungsgenauigkeit im Master-Slave-Betrieb
Die Orientierungsgenauigkeit im Master-Slave-Betrieb muss den Herstellerangaben entsprechen.
Vorschriften in den Begleitdokumenten.
4.2.2.4 Wiederholgenauigkeit der Master-Slave-Betriebsorientierung
Die Wiederholgenauigkeit der Master-Slave-Betriebsorientierung muss den
Herstellervorschriften in den Begleitpapieren.
4.3 Genauigkeit der Positionierung von RA-Geräten unter Navigationsführung
4.3.1 Genauigkeit der Positionierung von RA-Geräten unter Navigationsführung
Die Positioniergenauigkeit muss den Herstellervorgaben in der
Begleitdokumente.
4.3.2 Positionierung der RA-Ausrüstung ...
Aktie