1
/
de
12
PayPal, credit cards. Download editable-PDF & invoice in 1 second!
QC/T 842-2010 PDF en anglais (QCT842-2010)
QC/T 842-2010 PDF en anglais (QCT842-2010)
Prix habituel
$105.00 USD
Prix habituel
Prix promotionnel
$105.00 USD
Prix unitaire
/
par
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
Livraison : 3 secondes. Télécharger le vrai PDF + Facture.
Obtenez un DEVIS en 1 minute : Cliquez sur QC/T 842-2010
Versions historiques : QC/T 842-2010
Aperçu True-PDF (Recharger/Défiler si vide)
QC/T 842-2010 : Protocoles de communication entre le système de gestion de batterie et le chargeur externe pour véhicules électriques
QC/T 842-2010
CQ
NORME DE L'INDUSTRIE AUTOMOBILE
DE LA RÉPUBLIQUE POPULAIRE DE CHINE
ICS 43.080
T 47
Protocoles de communication entre la batterie
Système de gestion et chargeur hors-bord pour
Véhicules électriques
PUBLIÉ LE 22 NOVEMBRE 2010
EN VIGUEUR LE 1ER MARS 2011
Publié par le ministère de l'Industrie et des Technologies de l'information de la
La république populaire de chine
Table des matières
Avant-propos ... 3
1 Portée ... 4
2 Références normatives ... 4
3 Termes et définitions ... 5
4 Interface de couche physique ... 6
5 Couche de liaison de données ... 6
6 Processus de charge ... 8
Annexe A (normative) Format et contenu des messages de la couche application
... 11
Annexe B (informative) Organigrammes de facturation ... 25
Avant-propos
Le format de trame de données de cette norme est spécifié dans la norme technique du bus CAN.
Spécifications 2.0 publiées en septembre 1991.
L’annexe A de la présente norme est normative; l’annexe B est informative.
Cette norme a été proposée par et relève de la compétence du National
Comité technique de normalisation automobile.
Les organismes de rédaction de cette norme : Tianjin Qingyuan Electric Vehicle Co., Ltd.,
Centre de recherche et de technologie automobile de Chine, Shenzhen BYD Co., Ltd., Chery
Automobile Co., Ltd., Institut de technologie de Pékin, Université Jiaotong de Pékin,
Institut de génie électrique de l'Académie chinoise des sciences et de l'électronique de Chine
Institut de recherche Technology Group Corporation No. 10.
Les principaux rédacteurs de cette norme. Zhao Chuning, Zhou Nenghui, Meng Xiangfeng,
Zhang Guangxiu, Wang Zhenpo, Jiang Jiuchun, Zhang Jianhua, Xiao Chengwei, Wang
Lifang, Li Lei, Fang Yunzhou et Wang Fang.
Protocoles de communication entre la batterie
Système de gestion et chargeur hors-bord pour
Véhicules électriques
1 Portée
Cette norme spécifie les protocoles de communication entre la gestion de la batterie
système (ci-après dénommé BMS) et chargeur externe (ci-après dénommé
comme chargeur) pour véhicules électriques.
La présente norme s’applique à la recharge hors-bord des véhicules électriques.
L'identifiant CAN de cette norme est de 29 bits et le débit en bauds de communication est de 250 kbps,
mais cette norme ne se limite pas à un identifiant de 29 bits et à un débit de communication de 250 kbps
taux. Si d'autres formats sont utilisés, leur identifiant CAN doit être fait en référence à celui-ci
Standard.
La transmission des données de cette norme s'effectue au format des bits de poids faible transmis en premier.
La valeur de courant négative représente la charge ; la valeur de courant positive représente
décharger.
2 Références normatives
Les dispositions des documents suivants font partie de la présente partie par référence.
dans la présente norme. Pour les documents datés, les modifications ultérieures (à l'exclusion
Les rectificatifs ou révisions ne s'appliquent pas à la présente Norme. Cependant, toutes les parties qui y adhèrent
conclu un accord sur la base de cette norme sont encouragés à étudier si la dernière
versions de ces documents sont applicables. Pour les documents non datés, la dernière version
Les versions précédentes s'appliquent à la présente norme.
ISO 11898-1.2006, Véhicules routiers – Réseau de zone de contrôleur (CAN) – Partie 1. Données
Couche de liaison et signalisation physique
SAE J1939-11.2006, Pratique recommandée pour un contrôle en série et
Réseau de communication pour véhicules – Partie 11. Couche physique, 250 000 bits/s, torsadée
Paire blindée
message
Une ou plusieurs trames de données CAN avec le même numéro de groupe de paramètres
4 Interface de couche physique
4.1 La couche physique réalise la connexion électrique dans le réseau entre BMS
et chargeur
4.2 Une interface CAN indépendante du système de contrôle de l'ensemble de puissance est préférée
pour les communications entre le BMS et le chargeur.
4.3 La couche physique adoptant cette norme doit répondre aux spécifications de la
normes internationales ISO 11898-1 et SAE J1939-11.
5 Couche de liaison de données
5.1 Généralités
La couche de liaison de données assure une transmission de données fiable entre les connexions physiques.
5.2 Format de trame
Comme le montre la figure 1, la trame de données étendue CAN est divisée en différents champs de bits,
où le champ d'arbitrage qui a un identifiant de 29 bits, y compris un identifiant de base de 11 bits
et une extension d'identifiant de 18 bits. Le format de trame de données CAN de cette norme est
fait référence à la norme SAE J1939-21 ; et l'identifiant 29 bits du champ d'arbitrage est en outre
défini.
5.3 Unité de données du protocole
La trame de données CAN comprend une seule unité de données de protocole (PDU), comme illustré dans la Figure 2.
L'unité de données du protocole se compose de sept parties, à savoir la priorité (P), les bits réservés (R),
page de données (DP), format PDU (PF), PDU spécifique (PS), adresse source (SA) et données
champ.
La description de toutes les parties de l’unité de données du protocole est la suivante.
5.3.1 Priorité (P)
ou le chargeur ne parvient pas à recevoir le message de l'autre dans le délai spécifié, il
il est déterminé qu'il s'agit d'un délai d'attente, et le temps de délai d'attente est toujours de 5 s, sauf indication contraire
spécifié ; et en cas de dépassement de délai, le BMS ou le chargeur envoie le message d'erreur
et entre dans l'état de gestion des erreurs. Voir l'annexe A pour les formats et le contenu de
messages ; et voir l'annexe B pour les organigrammes généraux et les organigrammes de toutes les phases
du processus de charge.
6.2 Phase de prise de contact
Une fois la connexion physique entre le BMS et le chargeur terminée et électrifiée,
et que le réglage manuel du format de l'identifiant CAN et du débit en bauds de communication est
terminé, le BMS et le chargeur entrent dans la phase de négociation. Pendant la négociation
phase, le BMS teste d'abord si l'alimentation auxiliaire basse tension est normale ; si
ce n'est pas normal, le BMS envoie un message d'erreur au chargeur et la charge devrait
couper la sortie de l'alimentation basse tension ; si l'alimentation basse tension est
Normalement, les deux parties doivent se serrer la main pendant la phase et déterminer la batterie
informations (par exemple le type de batterie et la date de fabrication du bloc-batterie) et la
informations pertinentes sur le chargeur (par exemple, le numéro du chargeur et le numéro de la prise de charge).
6.3 Phase de configuration
Après la phase de handshake, le BMS et le chargeur entrent dans la phase de configuration.
Pendant la phase, le chargeur envoie le message de sa capacité de sortie maximale à
le BMS ; ensuite le BMS juge si la charge peut être effectuée conformément à la
capacité de sortie maximale du chargeur.
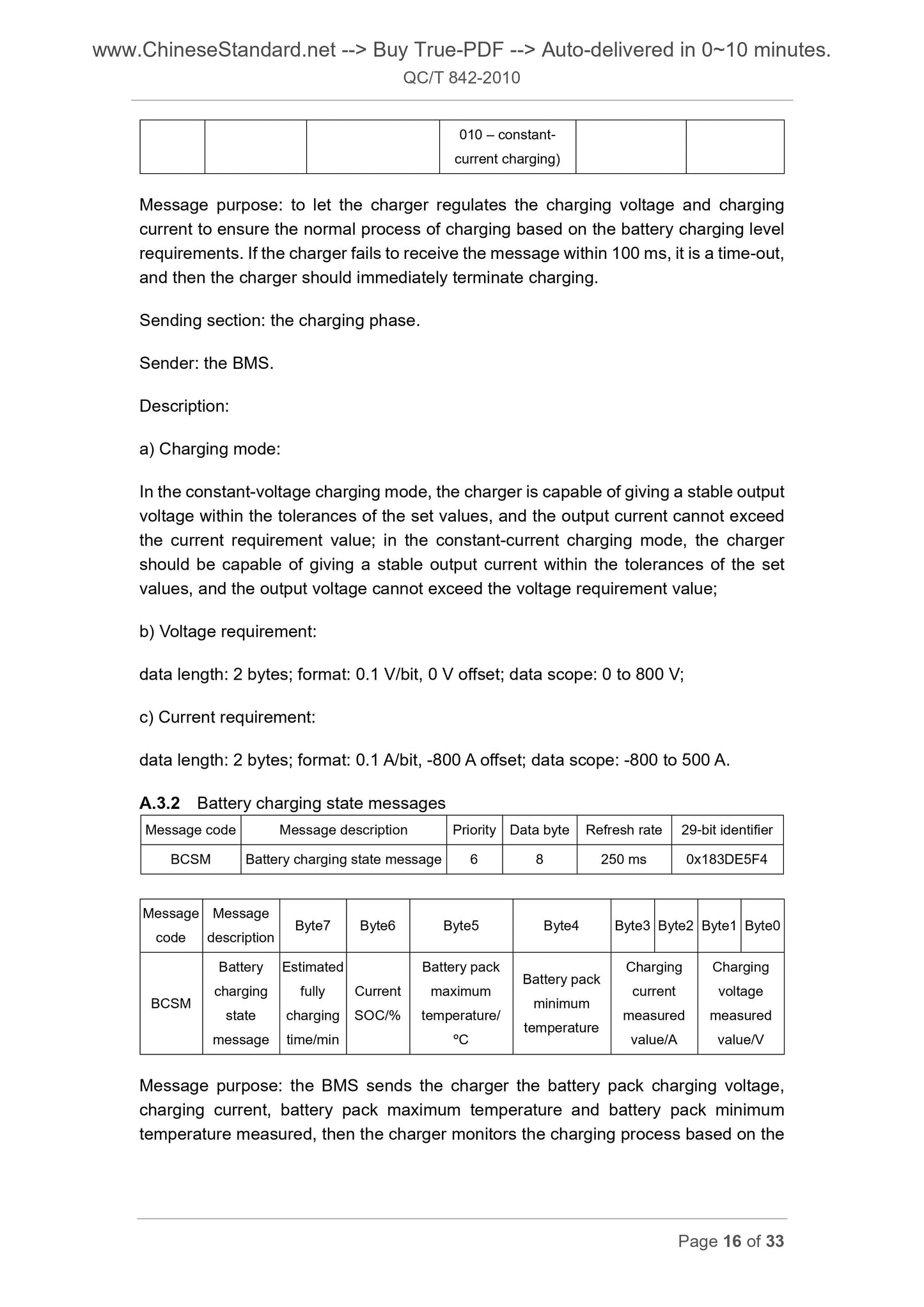
6.4 Phase de charge
Après la phase de configuration, le BMS et le chargeur entrent dans la phase de charge. Pendant
pendant toute la phase de charge, le BMS contrôle l'ensemble du processus de charge en envoyant
en temps réel les besoins en niveau de charge de la batterie au chargeur. Le chargeur
régule la tension et le courant de charge pour assurer le processus de charge
est normal en fonction des exigences de niveau de charge de la batterie ; en outre, le BMS et
les chargeurs s'envoient également leurs propres états de charge, et lorsque le BMS envoie un
message pour la première fois pendant la phase de charge, il donne la priorité au message
de l'état de charge de la batterie.
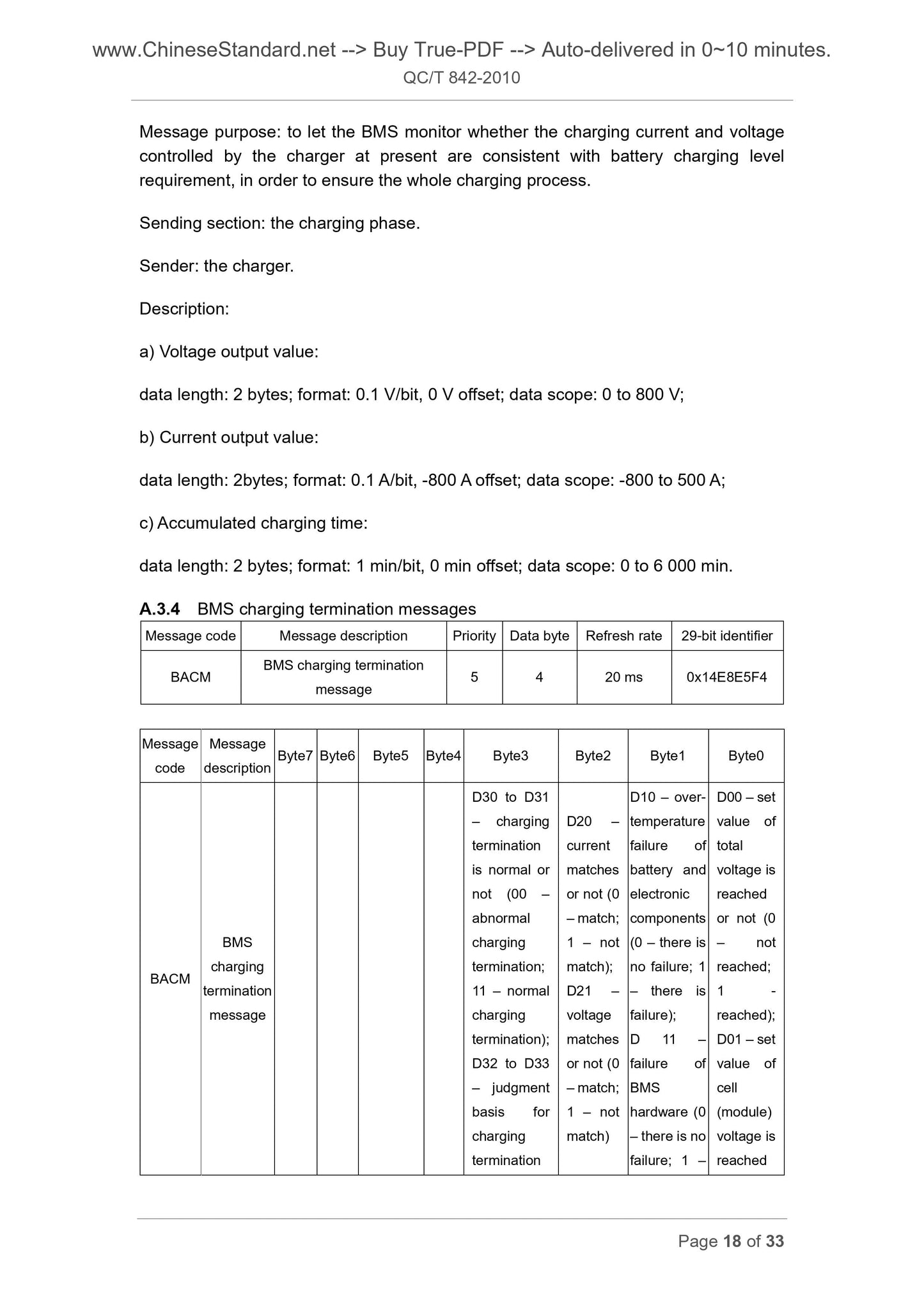
Le BMS détermine s'il faut mettre fin à la charge, en fonction du fait que
le processus de charge est normal ou non, si l'état de la batterie répond aux exigences de charge
conditions de résiliation fixées par le BMS ou non et si le BMS reçoit le
message de fin de charge du chargeur ; et le chargeur juge s'il faut
terminer la charge, selon que le processus de charge est normal ou
non, que les paramètres de charge définis par l'homme soient respectés ou non et que le
le message de fin de charge du BMS est reçu ou non.
6.5 Phase de fin de charge
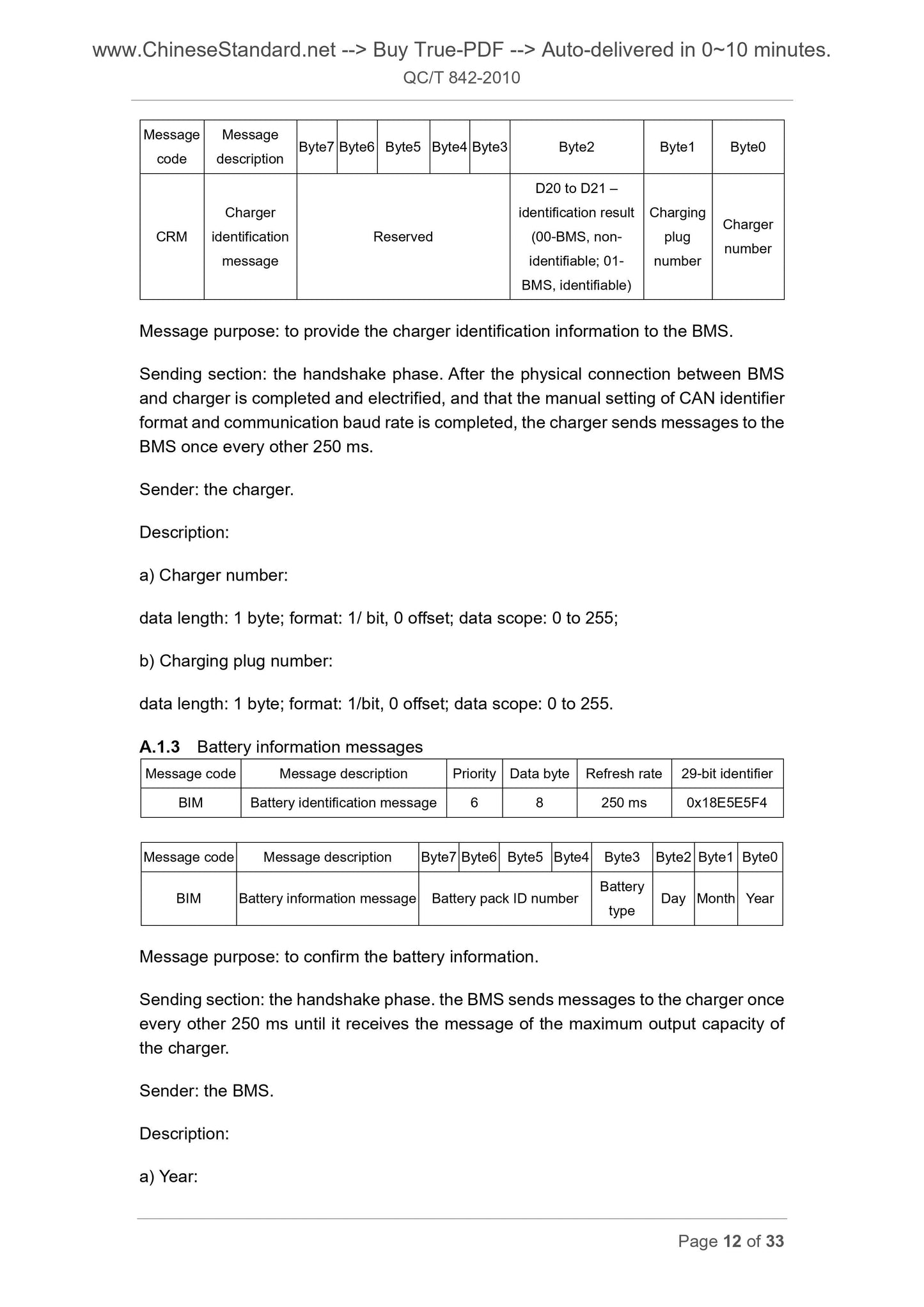
Message
code
Message
description Octet7 Octet6 Octet5 Octet4 Octet3 Octet2 Octet1 Octet0
CRM
Chargeur
identification
message
Réservé...
Obtenez un DEVIS en 1 minute : Cliquez sur QC/T 842-2010
Versions historiques : QC/T 842-2010
Aperçu True-PDF (Recharger/Défiler si vide)
QC/T 842-2010 : Protocoles de communication entre le système de gestion de batterie et le chargeur externe pour véhicules électriques
QC/T 842-2010
CQ
NORME DE L'INDUSTRIE AUTOMOBILE
DE LA RÉPUBLIQUE POPULAIRE DE CHINE
ICS 43.080
T 47
Protocoles de communication entre la batterie
Système de gestion et chargeur hors-bord pour
Véhicules électriques
PUBLIÉ LE 22 NOVEMBRE 2010
EN VIGUEUR LE 1ER MARS 2011
Publié par le ministère de l'Industrie et des Technologies de l'information de la
La république populaire de chine
Table des matières
Avant-propos ... 3
1 Portée ... 4
2 Références normatives ... 4
3 Termes et définitions ... 5
4 Interface de couche physique ... 6
5 Couche de liaison de données ... 6
6 Processus de charge ... 8
Annexe A (normative) Format et contenu des messages de la couche application
... 11
Annexe B (informative) Organigrammes de facturation ... 25
Avant-propos
Le format de trame de données de cette norme est spécifié dans la norme technique du bus CAN.
Spécifications 2.0 publiées en septembre 1991.
L’annexe A de la présente norme est normative; l’annexe B est informative.
Cette norme a été proposée par et relève de la compétence du National
Comité technique de normalisation automobile.
Les organismes de rédaction de cette norme : Tianjin Qingyuan Electric Vehicle Co., Ltd.,
Centre de recherche et de technologie automobile de Chine, Shenzhen BYD Co., Ltd., Chery
Automobile Co., Ltd., Institut de technologie de Pékin, Université Jiaotong de Pékin,
Institut de génie électrique de l'Académie chinoise des sciences et de l'électronique de Chine
Institut de recherche Technology Group Corporation No. 10.
Les principaux rédacteurs de cette norme. Zhao Chuning, Zhou Nenghui, Meng Xiangfeng,
Zhang Guangxiu, Wang Zhenpo, Jiang Jiuchun, Zhang Jianhua, Xiao Chengwei, Wang
Lifang, Li Lei, Fang Yunzhou et Wang Fang.
Protocoles de communication entre la batterie
Système de gestion et chargeur hors-bord pour
Véhicules électriques
1 Portée
Cette norme spécifie les protocoles de communication entre la gestion de la batterie
système (ci-après dénommé BMS) et chargeur externe (ci-après dénommé
comme chargeur) pour véhicules électriques.
La présente norme s’applique à la recharge hors-bord des véhicules électriques.
L'identifiant CAN de cette norme est de 29 bits et le débit en bauds de communication est de 250 kbps,
mais cette norme ne se limite pas à un identifiant de 29 bits et à un débit de communication de 250 kbps
taux. Si d'autres formats sont utilisés, leur identifiant CAN doit être fait en référence à celui-ci
Standard.
La transmission des données de cette norme s'effectue au format des bits de poids faible transmis en premier.
La valeur de courant négative représente la charge ; la valeur de courant positive représente
décharger.
2 Références normatives
Les dispositions des documents suivants font partie de la présente partie par référence.
dans la présente norme. Pour les documents datés, les modifications ultérieures (à l'exclusion
Les rectificatifs ou révisions ne s'appliquent pas à la présente Norme. Cependant, toutes les parties qui y adhèrent
conclu un accord sur la base de cette norme sont encouragés à étudier si la dernière
versions de ces documents sont applicables. Pour les documents non datés, la dernière version
Les versions précédentes s'appliquent à la présente norme.
ISO 11898-1.2006, Véhicules routiers – Réseau de zone de contrôleur (CAN) – Partie 1. Données
Couche de liaison et signalisation physique
SAE J1939-11.2006, Pratique recommandée pour un contrôle en série et
Réseau de communication pour véhicules – Partie 11. Couche physique, 250 000 bits/s, torsadée
Paire blindée
message
Une ou plusieurs trames de données CAN avec le même numéro de groupe de paramètres
4 Interface de couche physique
4.1 La couche physique réalise la connexion électrique dans le réseau entre BMS
et chargeur
4.2 Une interface CAN indépendante du système de contrôle de l'ensemble de puissance est préférée
pour les communications entre le BMS et le chargeur.
4.3 La couche physique adoptant cette norme doit répondre aux spécifications de la
normes internationales ISO 11898-1 et SAE J1939-11.
5 Couche de liaison de données
5.1 Généralités
La couche de liaison de données assure une transmission de données fiable entre les connexions physiques.
5.2 Format de trame
Comme le montre la figure 1, la trame de données étendue CAN est divisée en différents champs de bits,
où le champ d'arbitrage qui a un identifiant de 29 bits, y compris un identifiant de base de 11 bits
et une extension d'identifiant de 18 bits. Le format de trame de données CAN de cette norme est
fait référence à la norme SAE J1939-21 ; et l'identifiant 29 bits du champ d'arbitrage est en outre
défini.
5.3 Unité de données du protocole
La trame de données CAN comprend une seule unité de données de protocole (PDU), comme illustré dans la Figure 2.
L'unité de données du protocole se compose de sept parties, à savoir la priorité (P), les bits réservés (R),
page de données (DP), format PDU (PF), PDU spécifique (PS), adresse source (SA) et données
champ.
La description de toutes les parties de l’unité de données du protocole est la suivante.
5.3.1 Priorité (P)
ou le chargeur ne parvient pas à recevoir le message de l'autre dans le délai spécifié, il
il est déterminé qu'il s'agit d'un délai d'attente, et le temps de délai d'attente est toujours de 5 s, sauf indication contraire
spécifié ; et en cas de dépassement de délai, le BMS ou le chargeur envoie le message d'erreur
et entre dans l'état de gestion des erreurs. Voir l'annexe A pour les formats et le contenu de
messages ; et voir l'annexe B pour les organigrammes généraux et les organigrammes de toutes les phases
du processus de charge.
6.2 Phase de prise de contact
Une fois la connexion physique entre le BMS et le chargeur terminée et électrifiée,
et que le réglage manuel du format de l'identifiant CAN et du débit en bauds de communication est
terminé, le BMS et le chargeur entrent dans la phase de négociation. Pendant la négociation
phase, le BMS teste d'abord si l'alimentation auxiliaire basse tension est normale ; si
ce n'est pas normal, le BMS envoie un message d'erreur au chargeur et la charge devrait
couper la sortie de l'alimentation basse tension ; si l'alimentation basse tension est
Normalement, les deux parties doivent se serrer la main pendant la phase et déterminer la batterie
informations (par exemple le type de batterie et la date de fabrication du bloc-batterie) et la
informations pertinentes sur le chargeur (par exemple, le numéro du chargeur et le numéro de la prise de charge).
6.3 Phase de configuration
Après la phase de handshake, le BMS et le chargeur entrent dans la phase de configuration.
Pendant la phase, le chargeur envoie le message de sa capacité de sortie maximale à
le BMS ; ensuite le BMS juge si la charge peut être effectuée conformément à la
capacité de sortie maximale du chargeur.
6.4 Phase de charge
Après la phase de configuration, le BMS et le chargeur entrent dans la phase de charge. Pendant
pendant toute la phase de charge, le BMS contrôle l'ensemble du processus de charge en envoyant
en temps réel les besoins en niveau de charge de la batterie au chargeur. Le chargeur
régule la tension et le courant de charge pour assurer le processus de charge
est normal en fonction des exigences de niveau de charge de la batterie ; en outre, le BMS et
les chargeurs s'envoient également leurs propres états de charge, et lorsque le BMS envoie un
message pour la première fois pendant la phase de charge, il donne la priorité au message
de l'état de charge de la batterie.
Le BMS détermine s'il faut mettre fin à la charge, en fonction du fait que
le processus de charge est normal ou non, si l'état de la batterie répond aux exigences de charge
conditions de résiliation fixées par le BMS ou non et si le BMS reçoit le
message de fin de charge du chargeur ; et le chargeur juge s'il faut
terminer la charge, selon que le processus de charge est normal ou
non, que les paramètres de charge définis par l'homme soient respectés ou non et que le
le message de fin de charge du BMS est reçu ou non.
6.5 Phase de fin de charge
Message
code
Message
description Octet7 Octet6 Octet5 Octet4 Octet3 Octet2 Octet1 Octet0
CRM
Chargeur
identification
message
Réservé...
Partager