1
/
de
12
PayPal, credit cards. Download editable-PDF & invoice in 1 second!
YY/T 1712-2021 PDF en français (YYT1712-2021)
YY/T 1712-2021 PDF en français (YYT1712-2021)
Prix habituel
$350.00 USD
Prix habituel
Prix promotionnel
$350.00 USD
Prix unitaire
/
par
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
Livraison : 3 secondes. Télécharger le vrai PDF + Facture.
Obtenez un DEVIS en 1 minute : Cliquez sur YY/T 1712-2021
Versions historiques : YY/T 1712-2021
Aperçu True-PDF (Recharger/Défiler si vide)
YY/T 1712-2021 : Équipement médical chirurgical assisté et système médical chirurgical assisté utilisant la technologie robotique
AA/T 1712-2021
Oui
NORME DE L'INDUSTRIE PHARMACEUTIQUE
DE LA RÉPUBLIQUE POPULAIRE DE CHINE
ICS 11.040
C 39
Matériel médical chirurgical assisté et assisté
système médical chirurgical utilisant la robotique
technologie
PUBLIÉ LE : 09 MARS 2021
Mis en œuvre le : 01 octobre 2022
Publié par : National Medical Products Administration
Table des matières
Avant-propos ... 3
Présentation ... 4
1 Portée ... 5
2 Références normatives ... 5
3 Termes et définitions ... 6
4 Exigences ... 10
4.1 Conditions de l'environnement de travail ... 10
4.2 Précision de l'équipement RA de contrôle maître-esclave ... 10
4.3 Précision de positionnement de l'équipement RA sous guidage de navigation ... 11
4.4 Espace maximal et espace de travail effectif ... 12
4.5 Capacité de charge du bras robotisé ... 12
4.6 Temporisation de contrôle maître-esclave ... 12
4.7 Essai environnemental... 12
4.8 Exigences de sécurité ... 13
5 Méthodes d'essai ... 14
5.1 Conditions de l'environnement de travail ... 14
5.2 Précision de l'équipement RA de contrôle maître-esclave ... 14
5.3 Précision de positionnement de l'équipement RA sous guidage de navigation ... 24
5.4 Espace maximal et espace de travail effectif ... 27
5.5 Capacité de charge mécanique ... 29
5.6 Temporisation de contrôle maître-esclave ... 30
5.7 Essai environnemental... 32
5.8 Exigences de sécurité ... 32
Matériel médical chirurgical assisté et assisté
système médical chirurgical utilisant la robotique
technologie
1 Portée
Cette norme spécifie les termes et définitions, les exigences et les tests
méthodes pour l'équipement médical chirurgical assisté et l'équipement médical chirurgical assisté
système utilisant la technologie robotique.
La présente norme s'applique aux équipements médicaux chirurgicaux assistés et aux
système médical chirurgical utilisant la technologie robotique (ci-après dénommé
comme « équipement RA »).
2 Références normatives
Les documents suivants sont indispensables à l’application de ce document.
Pour les références datées, seule la version datée s'applique à ce document.
références non datées, la dernière édition (y compris tous les amendements) s'applique à cette
document.
GB 9706.1, Appareils électromédicaux - Partie 1 : Exigences générales pour
sécurité de base et performances essentielles
GB/T 12642, Robots industriels - Critères de performance et tests associés
méthodes
GB/T 12643, Robots et dispositifs robotisés - Vocabulaire
GB/T 14710, Exigences environnementales et méthodes d'essai pour les équipements médicaux
équipement électrique
YY/T 0043, Aiguille de suture médicale
YY 0167, Suture chirurgicale non résorbable
YY/T 1686, Équipements médicaux électriques utilisant la technologie robotique -
Classification
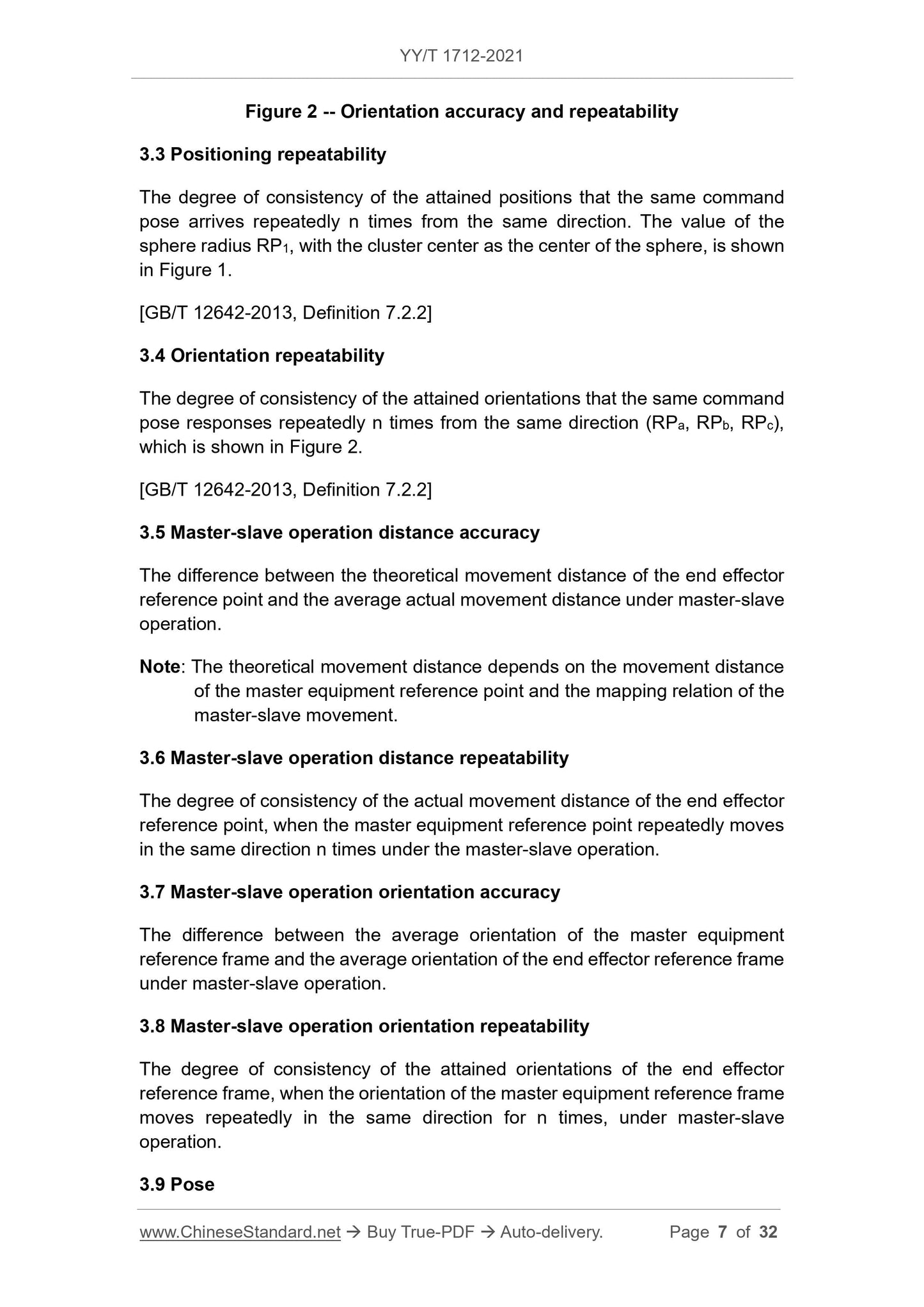
Figure 2 – Précision et répétabilité de l’orientation
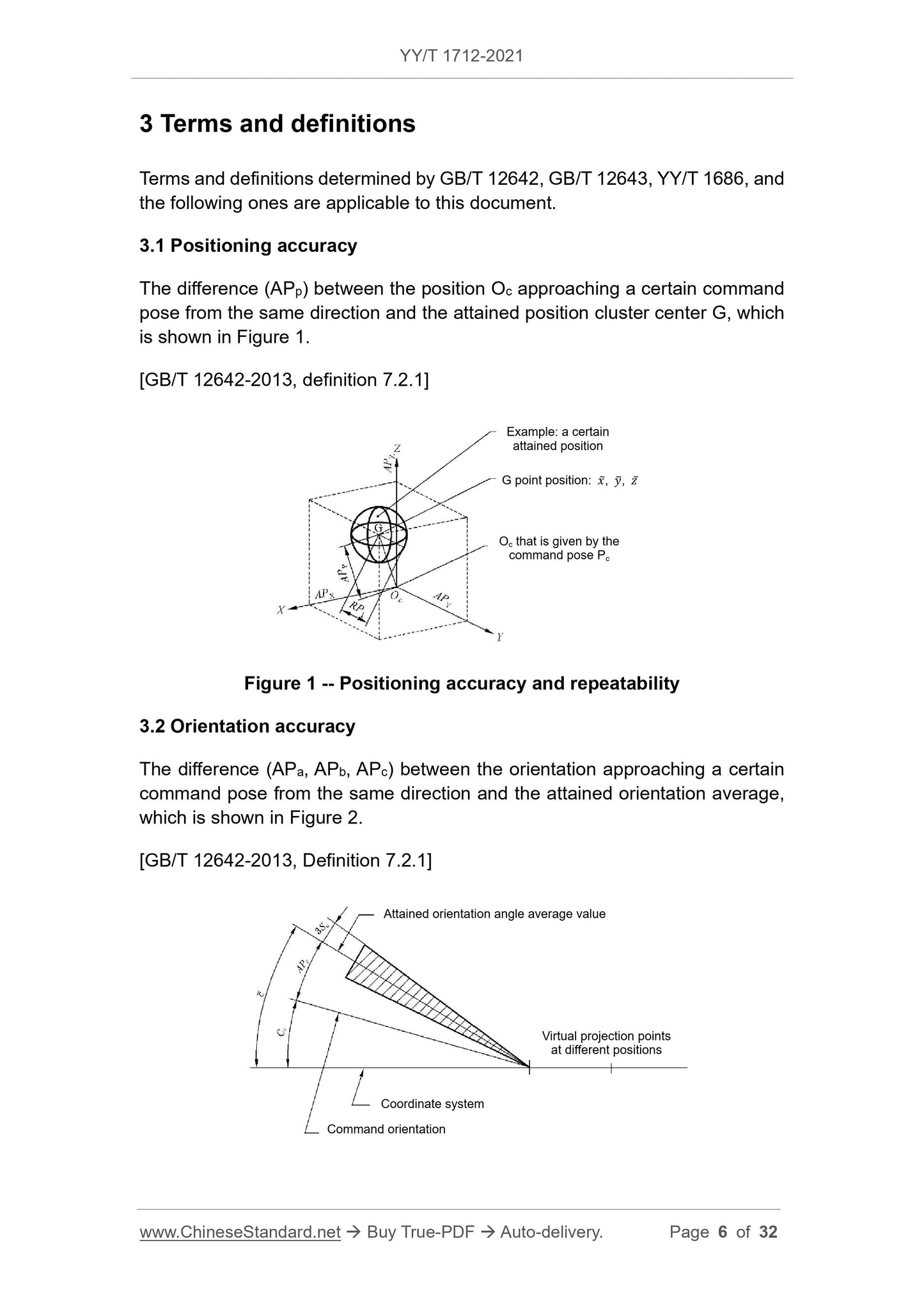
3.3 Répétabilité du positionnement
Le degré de cohérence des positions atteintes par le même commandement
pose arrive à plusieurs reprises n fois depuis la même direction. La valeur de la
le rayon de la sphère RP1, avec le centre du cluster comme centre de la sphère, est représenté
dans la figure 1.
[GB/T 12642-2013, Définition 7.2.2]
3.4 Répétabilité de l'orientation
Le degré de cohérence des orientations atteintes que le même commandement
poser des réponses de manière répétée n fois dans la même direction (RPa, RPb, RPc),
qui est illustré dans la figure 2.
[GB/T 12642-2013, Définition 7.2.2]
3.5 Précision de la distance de fonctionnement maître-esclave
La différence entre la distance de mouvement théorique de l'effecteur final
point de référence et la distance de mouvement réelle moyenne sous maître-esclave
opération.
Remarque : La distance de mouvement théorique dépend de la distance de mouvement
du point de référence de l'équipement maître et de la relation de mappage de l'
mouvement maître-esclave.
3.6 Répétabilité de la distance de fonctionnement maître-esclave
Le degré de cohérence de la distance de mouvement réelle de l'effecteur final
point de référence, lorsque le point de référence de l'équipement maître se déplace à plusieurs reprises
dans la même direction n fois sous l'opération maître-esclave.
3.7 Précision de l'orientation du fonctionnement maître-esclave
La différence entre l'orientation moyenne de l'équipement maître
référentiel et l'orientation moyenne du référentiel de l'effecteur terminal
en fonctionnement maître-esclave.
3.8 Répétabilité de l'orientation du fonctionnement maître-esclave
Le degré de cohérence des orientations atteintes de l'effecteur final
cadre de référence, lorsque l'orientation du cadre de référence de l'équipement maître
se déplace de manière répétée dans la même direction pendant n fois, sous maître-esclave
opération.
3.9 Pose
3.17 Effecteur terminal
L'équipement qui est installé à l'interface mécanique pour l'équipement RA
pour accomplir ses tâches chirurgicales.
3.18 Point de référence de l'effecteur final
Le point de référence qui est défini sur l'effecteur final dans un but précis.
test, le centre géométrique du dernier axe d'articulation de l'effecteur terminal est généralement
utilisé comme point de référence de mesure.
[GB/T 12643-2013/ISO 8373:2012, définition 4.9]
3.19 Référentiel de l'effecteur terminal
Le cadre de référence qui est défini sur l'effecteur final dans un but précis. Pendant
le test, il est généralement défini au point de référence de l'effecteur final.
3.20 Point de référence de l'équipement maître
Le point de référence qui est défini sur l'équipement maître afin de refléter le
informations sur l'opération de la main du médecin pendant l'opération. Pendant le test,
l'intersection de plusieurs axes articulaires à l'extrémité de l'équipement maître est
généralement utilisé comme point de référence de mesure.
3.21 Référentiel de l'équipement maître
Le cadre de référence qui est défini sur l'équipement maître afin de refléter le
informations sur l'opération de la main du médecin pendant l'opération. Pendant le test,
il est généralement défini au point de référence de l'équipement maître.
3.22 Interface mécanique
Le composant, sur la surface de montage de l'équipement RA, qui est autorisé
pour connecter des accessoires et des composants détachables, ou est exploité par le RA
mouvement d'équipement.
Remarque 1 : L'interface mécanique peut être utilisée pour fixer des éléments stériles.
Remarque 2 : L'interface mécanique peut fournir une isolation et d'autres fonctions
(comme les limites aseptiques) pour répondre aux exigences de sécurité de base.
Remarque 3 : L’équipement RA peut avoir zéro, une ou plusieurs interfaces mécaniques.
Remarque : réécrire la norme IEC 80601-2-77.
3.23 Contrôle maître-esclave
La répétabilité du positionnement doit être conforme aux réglementations du fabricant en vigueur.
documents d'accompagnement.
4.2.1.4 Répétabilité de l'orientation
La répétabilité de l'orientation doit être conforme aux réglementations du fabricant en vigueur.
documents d'accompagnement.
4.2.2 Précision du fonctionnement maître-esclave et fonctionnement maître-esclave
répétabilité
4.2.2.1 Précision de la distance de fonctionnement maître-esclave
La précision de la distance de fonctionnement maître-esclave doit être conforme aux spécifications du fabricant.
réglementation dans les documents d'accompagnement.
4.2.2.2 Répétabilité de la distance de fonctionnement maître-esclave
La répétabilité de la distance de fonctionnement maître-esclave doit être conforme aux
les prescriptions du fabricant dans les documents d'accompagnement.
4.2.2.3 Précision de l'orientation du fonctionnement maître-esclave
La précision d'orientation du fonctionnement maître-esclave doit être conforme aux spécifications du fabricant.
réglementation dans les documents d'accompagnement.
4.2.2.4 Répétabilité de l'orientation du fonctionnement maître-esclave
La répétabilité de l'orientation de l'opération maître-esclave doit être conforme aux
les prescriptions du fabricant dans les documents d'accompagnement.
4.3 Précision de positionnement de l'équipement RA sous guidage de navigation
4.3.1 Précision de positionnement de l'équipement RA sous guidage de navigation
La précision de positionnement doit être conforme aux réglementations du fabricant en vigueur.
documents d'accompagnement.
4.3.2 Positionnement de l'équipement RA ...
Obtenez un DEVIS en 1 minute : Cliquez sur YY/T 1712-2021
Versions historiques : YY/T 1712-2021
Aperçu True-PDF (Recharger/Défiler si vide)
YY/T 1712-2021 : Équipement médical chirurgical assisté et système médical chirurgical assisté utilisant la technologie robotique
AA/T 1712-2021
Oui
NORME DE L'INDUSTRIE PHARMACEUTIQUE
DE LA RÉPUBLIQUE POPULAIRE DE CHINE
ICS 11.040
C 39
Matériel médical chirurgical assisté et assisté
système médical chirurgical utilisant la robotique
technologie
PUBLIÉ LE : 09 MARS 2021
Mis en œuvre le : 01 octobre 2022
Publié par : National Medical Products Administration
Table des matières
Avant-propos ... 3
Présentation ... 4
1 Portée ... 5
2 Références normatives ... 5
3 Termes et définitions ... 6
4 Exigences ... 10
4.1 Conditions de l'environnement de travail ... 10
4.2 Précision de l'équipement RA de contrôle maître-esclave ... 10
4.3 Précision de positionnement de l'équipement RA sous guidage de navigation ... 11
4.4 Espace maximal et espace de travail effectif ... 12
4.5 Capacité de charge du bras robotisé ... 12
4.6 Temporisation de contrôle maître-esclave ... 12
4.7 Essai environnemental... 12
4.8 Exigences de sécurité ... 13
5 Méthodes d'essai ... 14
5.1 Conditions de l'environnement de travail ... 14
5.2 Précision de l'équipement RA de contrôle maître-esclave ... 14
5.3 Précision de positionnement de l'équipement RA sous guidage de navigation ... 24
5.4 Espace maximal et espace de travail effectif ... 27
5.5 Capacité de charge mécanique ... 29
5.6 Temporisation de contrôle maître-esclave ... 30
5.7 Essai environnemental... 32
5.8 Exigences de sécurité ... 32
Matériel médical chirurgical assisté et assisté
système médical chirurgical utilisant la robotique
technologie
1 Portée
Cette norme spécifie les termes et définitions, les exigences et les tests
méthodes pour l'équipement médical chirurgical assisté et l'équipement médical chirurgical assisté
système utilisant la technologie robotique.
La présente norme s'applique aux équipements médicaux chirurgicaux assistés et aux
système médical chirurgical utilisant la technologie robotique (ci-après dénommé
comme « équipement RA »).
2 Références normatives
Les documents suivants sont indispensables à l’application de ce document.
Pour les références datées, seule la version datée s'applique à ce document.
références non datées, la dernière édition (y compris tous les amendements) s'applique à cette
document.
GB 9706.1, Appareils électromédicaux - Partie 1 : Exigences générales pour
sécurité de base et performances essentielles
GB/T 12642, Robots industriels - Critères de performance et tests associés
méthodes
GB/T 12643, Robots et dispositifs robotisés - Vocabulaire
GB/T 14710, Exigences environnementales et méthodes d'essai pour les équipements médicaux
équipement électrique
YY/T 0043, Aiguille de suture médicale
YY 0167, Suture chirurgicale non résorbable
YY/T 1686, Équipements médicaux électriques utilisant la technologie robotique -
Classification
Figure 2 – Précision et répétabilité de l’orientation
3.3 Répétabilité du positionnement
Le degré de cohérence des positions atteintes par le même commandement
pose arrive à plusieurs reprises n fois depuis la même direction. La valeur de la
le rayon de la sphère RP1, avec le centre du cluster comme centre de la sphère, est représenté
dans la figure 1.
[GB/T 12642-2013, Définition 7.2.2]
3.4 Répétabilité de l'orientation
Le degré de cohérence des orientations atteintes que le même commandement
poser des réponses de manière répétée n fois dans la même direction (RPa, RPb, RPc),
qui est illustré dans la figure 2.
[GB/T 12642-2013, Définition 7.2.2]
3.5 Précision de la distance de fonctionnement maître-esclave
La différence entre la distance de mouvement théorique de l'effecteur final
point de référence et la distance de mouvement réelle moyenne sous maître-esclave
opération.
Remarque : La distance de mouvement théorique dépend de la distance de mouvement
du point de référence de l'équipement maître et de la relation de mappage de l'
mouvement maître-esclave.
3.6 Répétabilité de la distance de fonctionnement maître-esclave
Le degré de cohérence de la distance de mouvement réelle de l'effecteur final
point de référence, lorsque le point de référence de l'équipement maître se déplace à plusieurs reprises
dans la même direction n fois sous l'opération maître-esclave.
3.7 Précision de l'orientation du fonctionnement maître-esclave
La différence entre l'orientation moyenne de l'équipement maître
référentiel et l'orientation moyenne du référentiel de l'effecteur terminal
en fonctionnement maître-esclave.
3.8 Répétabilité de l'orientation du fonctionnement maître-esclave
Le degré de cohérence des orientations atteintes de l'effecteur final
cadre de référence, lorsque l'orientation du cadre de référence de l'équipement maître
se déplace de manière répétée dans la même direction pendant n fois, sous maître-esclave
opération.
3.9 Pose
3.17 Effecteur terminal
L'équipement qui est installé à l'interface mécanique pour l'équipement RA
pour accomplir ses tâches chirurgicales.
3.18 Point de référence de l'effecteur final
Le point de référence qui est défini sur l'effecteur final dans un but précis.
test, le centre géométrique du dernier axe d'articulation de l'effecteur terminal est généralement
utilisé comme point de référence de mesure.
[GB/T 12643-2013/ISO 8373:2012, définition 4.9]
3.19 Référentiel de l'effecteur terminal
Le cadre de référence qui est défini sur l'effecteur final dans un but précis. Pendant
le test, il est généralement défini au point de référence de l'effecteur final.
3.20 Point de référence de l'équipement maître
Le point de référence qui est défini sur l'équipement maître afin de refléter le
informations sur l'opération de la main du médecin pendant l'opération. Pendant le test,
l'intersection de plusieurs axes articulaires à l'extrémité de l'équipement maître est
généralement utilisé comme point de référence de mesure.
3.21 Référentiel de l'équipement maître
Le cadre de référence qui est défini sur l'équipement maître afin de refléter le
informations sur l'opération de la main du médecin pendant l'opération. Pendant le test,
il est généralement défini au point de référence de l'équipement maître.
3.22 Interface mécanique
Le composant, sur la surface de montage de l'équipement RA, qui est autorisé
pour connecter des accessoires et des composants détachables, ou est exploité par le RA
mouvement d'équipement.
Remarque 1 : L'interface mécanique peut être utilisée pour fixer des éléments stériles.
Remarque 2 : L'interface mécanique peut fournir une isolation et d'autres fonctions
(comme les limites aseptiques) pour répondre aux exigences de sécurité de base.
Remarque 3 : L’équipement RA peut avoir zéro, une ou plusieurs interfaces mécaniques.
Remarque : réécrire la norme IEC 80601-2-77.
3.23 Contrôle maître-esclave
La répétabilité du positionnement doit être conforme aux réglementations du fabricant en vigueur.
documents d'accompagnement.
4.2.1.4 Répétabilité de l'orientation
La répétabilité de l'orientation doit être conforme aux réglementations du fabricant en vigueur.
documents d'accompagnement.
4.2.2 Précision du fonctionnement maître-esclave et fonctionnement maître-esclave
répétabilité
4.2.2.1 Précision de la distance de fonctionnement maître-esclave
La précision de la distance de fonctionnement maître-esclave doit être conforme aux spécifications du fabricant.
réglementation dans les documents d'accompagnement.
4.2.2.2 Répétabilité de la distance de fonctionnement maître-esclave
La répétabilité de la distance de fonctionnement maître-esclave doit être conforme aux
les prescriptions du fabricant dans les documents d'accompagnement.
4.2.2.3 Précision de l'orientation du fonctionnement maître-esclave
La précision d'orientation du fonctionnement maître-esclave doit être conforme aux spécifications du fabricant.
réglementation dans les documents d'accompagnement.
4.2.2.4 Répétabilité de l'orientation du fonctionnement maître-esclave
La répétabilité de l'orientation de l'opération maître-esclave doit être conforme aux
les prescriptions du fabricant dans les documents d'accompagnement.
4.3 Précision de positionnement de l'équipement RA sous guidage de navigation
4.3.1 Précision de positionnement de l'équipement RA sous guidage de navigation
La précision de positionnement doit être conforme aux réglementations du fabricant en vigueur.
documents d'accompagnement.
4.3.2 Positionnement de l'équipement RA ...
Partager