

1
/
su
12
PayPal, credit cards. Download editable-PDF & invoice In 1 second!
CICAP-B.1-2022 English PDF (CICAP-B.1-2022)
CICAP-B.1-2022 English PDF (CICAP-B.1-2022)
Prezzo di listino
$865.00 USD
Prezzo di listino
Prezzo scontato
$865.00 USD
Prezzo unitario
/
per
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Delivery: 3 seconds. Download true-PDF + Invoice.
Get QUOTATION in 1-minute: Click CICAP-B.1-2022
Historical versions: CICAP-B.1-2022
Preview True-PDF (Reload/Scroll if blank)
CICAP-B.1-2022: China intelligent connected vehicle technical regulations - Appendix B.1: Basic parking assistance evaluation detailed-rules
CICAP Annex B.1
C-ICAP
CHINA INTELLIGENT CONNECTED VEHICLE
TECHNICAL REGULATIONS (C-ICAP)
Annex B.1
Evaluation Rules for Basic Parking Assist (Version 1.0)
December 2022
Table of Contents
1 Evaluation method ... 3
1.1 Indicator system ... 3
1.2 Indicator weight distribution ... 4
1.2.1 Weight distribution of level-one indicators ... 4
1.2.2 Weight distribution of level-two indicators ... 4
1.2.3 Weight distribution of level-three indicators ... 4
1.3 Scoring method ... 5
1.3.1 Calculation method for level-one indicator score ... 5
1.3.2 Calculation method for level-two indicator score ... 6
1.3.3 Calculation method for level-three indicator score ... 6
2 Test methods ... 12
2.1 Scope of application ... 12
2.2 Normative references ... 12
2.3 Terms and definitions ... 13
2.4 General ... 13
2.5 Test conditions ... 14
2.5.1 Test site conditions ... 14
2.5.2 Test weather conditions ... 14
2.5.3 Equipment requirements ... 15
2.5.4 Test procedure ... 15
2.6 Test items ... 16
2.6.1 Parking capacity in front of parking space ... 16
2.6.2 Remote parking capability in front of parking space ... 35
Evaluation Rules for Basic Parking Assist
1 Evaluation method
1.1 Indicator system
The indicators for basic parking assist are shown in Table 1-1.
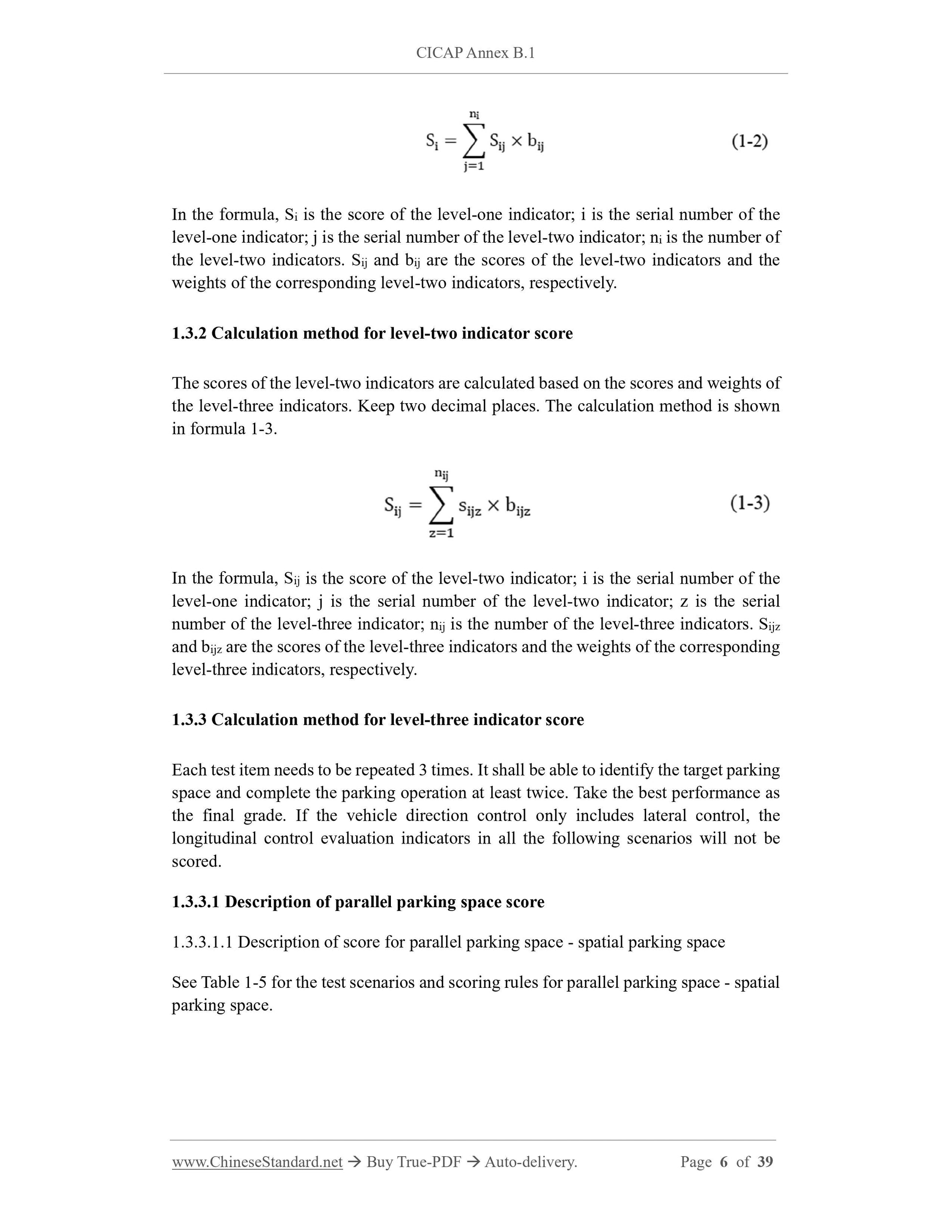
In the formula, Si is the score of the level-one indicator; i is the serial number of the
level-one indicator; j is the serial number of the level-two indicator; ni is the number of
the level-two indicators. Sij and bij are the scores of the level-two indicators and the
weights of the corresponding level-two indicators, respectively.
1.3.2 Calculation method for level-two indicator score
The scores of the level-two indicators are calculated based on the scores and weights of
the level-three indicators. Keep two decimal places. The calculation method is shown
in formula 1-3.
In the formula, Sij is the score of the level-two indicator; i is the serial number of the
level-one indicator; j is the serial number of the level-two indicator; z is the serial
number of the level-three indicator; nij is the number of the level-three indicators. Sijz
and bijz are the scores of the level-three indicators and the weights of the corresponding
level-three indicators, respectively.
1.3.3 Calculation method for level-three indicator score
Each test item needs to be repeated 3 times. It shall be able to identify the target parking
space and complete the parking operation at least twice. Take the best performance as
the final grade. If the vehicle direction control only includes lateral control, the
longitudinal control evaluation indicators in all the following scenarios will not be
scored.
1.3.3.1 Description of parallel parking space score
1.3.3.1.1 Description of score for parallel parking space - spatial parking space
See Table 1-5 for the test scenarios and scoring rules for parallel parking space - spatial
parking space.
1.3.3.4 Description of remote control failure
1.3.3.4.1 Description of score for continuous loss of remote control of remote parking
assist
(1) When there is no remote control failure, the remote control parking function can
be turned on normally; after the remote control function is lost, when the vehicle
under test exits/pauses the parking assist state, the vehicle stops, the system
alarms and the braking distance is not greater than 0.7 meters, it shall have 100
scores.
(2) When there is no remote control failure, the remote control parking function can
be turned on normally; after the remote control function is lost, when the vehicle
under test exits/pauses the parking assist state, the vehicle brakes, it shall have 80
scores.
1.3.3.5 Description of misuse of remote control function
1.3.3.5.1 Description of score for misuse of remote control function of remote parking
assist
Within 6 m of the remote control distance, if the remote control parking function can
be turned on normally, in the three tests of 2.6.2.2 test method (2), the remote parking
function is not turned on, it shall have 100 scores.
2 Test methods
2.1 Scope of application
This Specification applies to M1 passenger cars.
2.2 Normative references
The provisions in the following documents become part of this Specification, through
reference in this Specification. For dated references, their subsequent amendments
(excluding corrigendum) or revisions do not apply to this Specification. For undated
reference documents, the latest versions apply to this Specification.
GB 5768.3, Road traffic signs and markings - Part 3: Road traffic markings
ISO 16787, Intelligent transport systems - Assisted parking systems (APS)-
Performance requirements and test procedures
JGJ 100, Code for design of parking garage building
05MR404(GJBT-855), City road - Curbs
2.3 Terms and definitions
Vehicle under test
The vehicle that is capable of continuously controlling both lateral and longitudinal
motion and is tested in accordance with this test procedure.
Number of parking
During the process of parking the vehicle, when the gear position is shifted to Gear R
and the vehicle is moving, it is counted as the first parking. During the parking process,
when the gear position is switched from R to D or from D to R, they shall be counted
as one parking respectively.
2.4 General
The test of each scenario consists of two parts: test of parking space search capability
and test of parking capacity.
It can only carry out 3 tests at most for each test scenario. In the 3 tests, if it can identify
parking space and completes parking twice, it is considered that the scenario has passed
the test. Take the better one of the two tests for scoring. If the parking space can be
identified and the parking is completed in the first two tests, the third test will not be
carried out. If the vehicle does not identify the parking space or cannot complete
parking for 2 or more times in the 3 tests, then the working condition fails the test.
For the following scenario tests, unless otherwise specified, the following validity
requirements must be met:
1) The length of the vehicle under test is marked as X, and the width is marked as Y.
2) The lateral spacing d1 and d2 of the vehicle under test is 1.2±0.2 m.
3) During the parking capability test, the driving trajectory shall avoid collision with
the objects detected by the vehicle under test.
2.5.4.1.2.1 Make sure that the vehicle under test is loaded with a spare wheel (if
equipped) and vehicle tools. There shall be no other items in the vehicle.
2.5.4.1.2.2 Make sure that all tires are inflated to the manufacturer's recommended tire
pressure for the current load.
2.5.4.2 Test preparation
2.5.4.2.1 Active hood system
When the failure of the active hood system of the vehicle does not affect the normal
operation of the system, the system shall be disabled before the test.
2.5.4.2.2 Airbag system
When the failure of the airbag system of the vehicle does not affect the normal operation
of the system, the system shall be disabled before the test.
2.6 Test items
2.6.1 Parking capacity in front of parking space
2.6.1.1 Level parking capacity
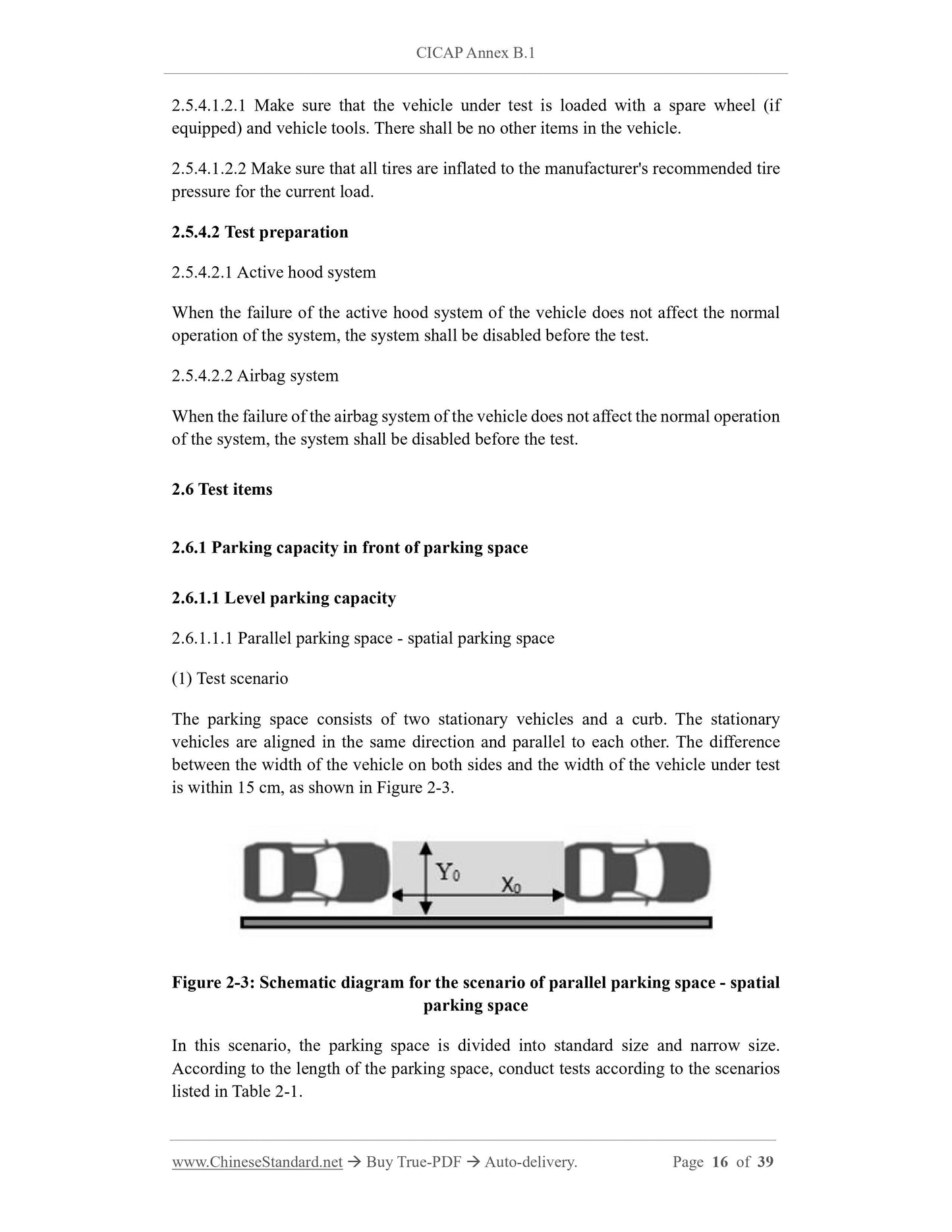
2.6.1.1.1 Parallel parking space - spatial parking space
(1) Test scenario
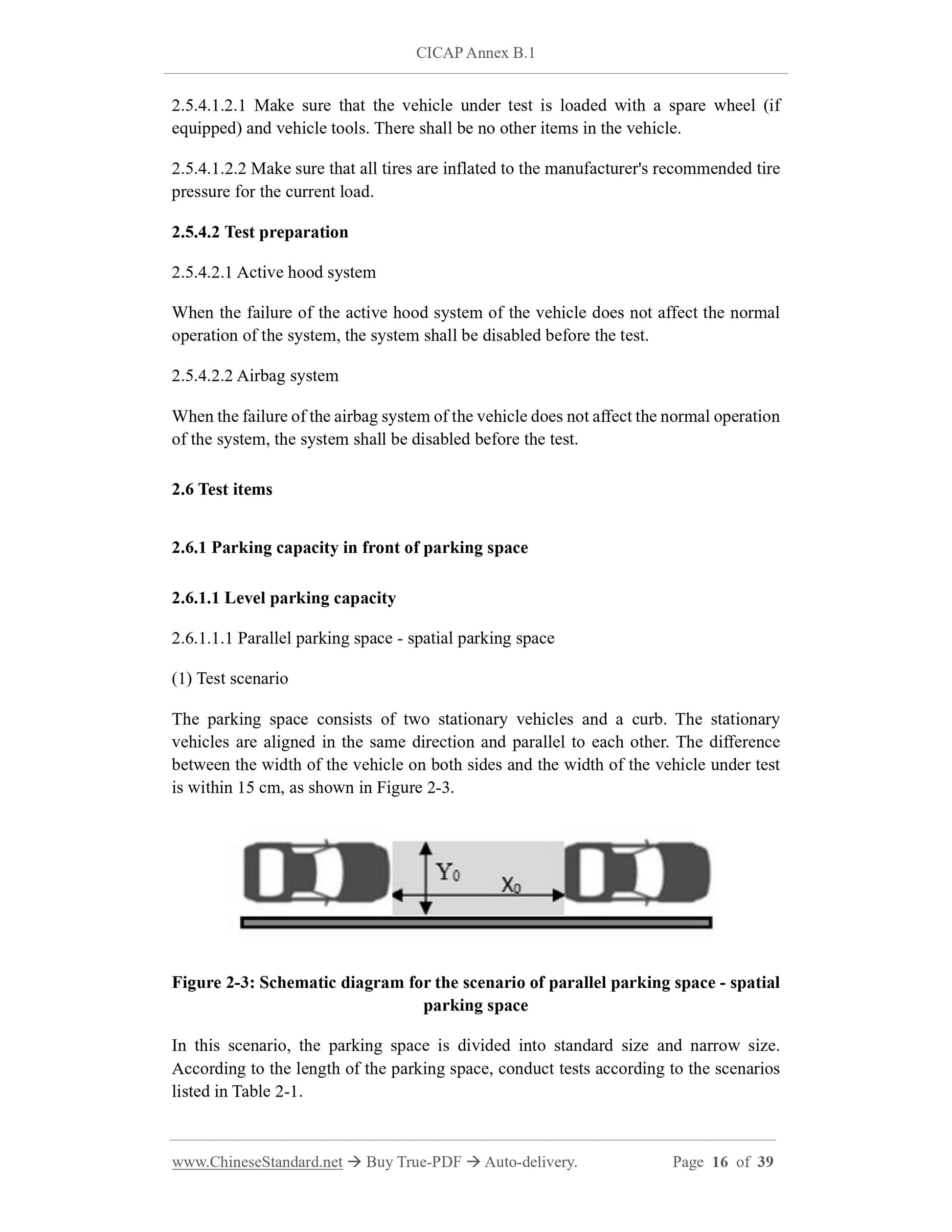
The parking space consists of two stationary vehicles and a curb. The stationary
vehicles are aligned in the same direction and parallel to each other. The difference
between the width of the vehicle on both sid...
Get QUOTATION in 1-minute: Click CICAP-B.1-2022
Historical versions: CICAP-B.1-2022
Preview True-PDF (Reload/Scroll if blank)
CICAP-B.1-2022: China intelligent connected vehicle technical regulations - Appendix B.1: Basic parking assistance evaluation detailed-rules
CICAP Annex B.1
C-ICAP
CHINA INTELLIGENT CONNECTED VEHICLE
TECHNICAL REGULATIONS (C-ICAP)
Annex B.1
Evaluation Rules for Basic Parking Assist (Version 1.0)
December 2022
Table of Contents
1 Evaluation method ... 3
1.1 Indicator system ... 3
1.2 Indicator weight distribution ... 4
1.2.1 Weight distribution of level-one indicators ... 4
1.2.2 Weight distribution of level-two indicators ... 4
1.2.3 Weight distribution of level-three indicators ... 4
1.3 Scoring method ... 5
1.3.1 Calculation method for level-one indicator score ... 5
1.3.2 Calculation method for level-two indicator score ... 6
1.3.3 Calculation method for level-three indicator score ... 6
2 Test methods ... 12
2.1 Scope of application ... 12
2.2 Normative references ... 12
2.3 Terms and definitions ... 13
2.4 General ... 13
2.5 Test conditions ... 14
2.5.1 Test site conditions ... 14
2.5.2 Test weather conditions ... 14
2.5.3 Equipment requirements ... 15
2.5.4 Test procedure ... 15
2.6 Test items ... 16
2.6.1 Parking capacity in front of parking space ... 16
2.6.2 Remote parking capability in front of parking space ... 35
Evaluation Rules for Basic Parking Assist
1 Evaluation method
1.1 Indicator system
The indicators for basic parking assist are shown in Table 1-1.
In the formula, Si is the score of the level-one indicator; i is the serial number of the
level-one indicator; j is the serial number of the level-two indicator; ni is the number of
the level-two indicators. Sij and bij are the scores of the level-two indicators and the
weights of the corresponding level-two indicators, respectively.
1.3.2 Calculation method for level-two indicator score
The scores of the level-two indicators are calculated based on the scores and weights of
the level-three indicators. Keep two decimal places. The calculation method is shown
in formula 1-3.
In the formula, Sij is the score of the level-two indicator; i is the serial number of the
level-one indicator; j is the serial number of the level-two indicator; z is the serial
number of the level-three indicator; nij is the number of the level-three indicators. Sijz
and bijz are the scores of the level-three indicators and the weights of the corresponding
level-three indicators, respectively.
1.3.3 Calculation method for level-three indicator score
Each test item needs to be repeated 3 times. It shall be able to identify the target parking
space and complete the parking operation at least twice. Take the best performance as
the final grade. If the vehicle direction control only includes lateral control, the
longitudinal control evaluation indicators in all the following scenarios will not be
scored.
1.3.3.1 Description of parallel parking space score
1.3.3.1.1 Description of score for parallel parking space - spatial parking space
See Table 1-5 for the test scenarios and scoring rules for parallel parking space - spatial
parking space.
1.3.3.4 Description of remote control failure
1.3.3.4.1 Description of score for continuous loss of remote control of remote parking
assist
(1) When there is no remote control failure, the remote control parking function can
be turned on normally; after the remote control function is lost, when the vehicle
under test exits/pauses the parking assist state, the vehicle stops, the system
alarms and the braking distance is not greater than 0.7 meters, it shall have 100
scores.
(2) When there is no remote control failure, the remote control parking function can
be turned on normally; after the remote control function is lost, when the vehicle
under test exits/pauses the parking assist state, the vehicle brakes, it shall have 80
scores.
1.3.3.5 Description of misuse of remote control function
1.3.3.5.1 Description of score for misuse of remote control function of remote parking
assist
Within 6 m of the remote control distance, if the remote control parking function can
be turned on normally, in the three tests of 2.6.2.2 test method (2), the remote parking
function is not turned on, it shall have 100 scores.
2 Test methods
2.1 Scope of application
This Specification applies to M1 passenger cars.
2.2 Normative references
The provisions in the following documents become part of this Specification, through
reference in this Specification. For dated references, their subsequent amendments
(excluding corrigendum) or revisions do not apply to this Specification. For undated
reference documents, the latest versions apply to this Specification.
GB 5768.3, Road traffic signs and markings - Part 3: Road traffic markings
ISO 16787, Intelligent transport systems - Assisted parking systems (APS)-
Performance requirements and test procedures
JGJ 100, Code for design of parking garage building
05MR404(GJBT-855), City road - Curbs
2.3 Terms and definitions
Vehicle under test
The vehicle that is capable of continuously controlling both lateral and longitudinal
motion and is tested in accordance with this test procedure.
Number of parking
During the process of parking the vehicle, when the gear position is shifted to Gear R
and the vehicle is moving, it is counted as the first parking. During the parking process,
when the gear position is switched from R to D or from D to R, they shall be counted
as one parking respectively.
2.4 General
The test of each scenario consists of two parts: test of parking space search capability
and test of parking capacity.
It can only carry out 3 tests at most for each test scenario. In the 3 tests, if it can identify
parking space and completes parking twice, it is considered that the scenario has passed
the test. Take the better one of the two tests for scoring. If the parking space can be
identified and the parking is completed in the first two tests, the third test will not be
carried out. If the vehicle does not identify the parking space or cannot complete
parking for 2 or more times in the 3 tests, then the working condition fails the test.
For the following scenario tests, unless otherwise specified, the following validity
requirements must be met:
1) The length of the vehicle under test is marked as X, and the width is marked as Y.
2) The lateral spacing d1 and d2 of the vehicle under test is 1.2±0.2 m.
3) During the parking capability test, the driving trajectory shall avoid collision with
the objects detected by the vehicle under test.
2.5.4.1.2.1 Make sure that the vehicle under test is loaded with a spare wheel (if
equipped) and vehicle tools. There shall be no other items in the vehicle.
2.5.4.1.2.2 Make sure that all tires are inflated to the manufacturer's recommended tire
pressure for the current load.
2.5.4.2 Test preparation
2.5.4.2.1 Active hood system
When the failure of the active hood system of the vehicle does not affect the normal
operation of the system, the system shall be disabled before the test.
2.5.4.2.2 Airbag system
When the failure of the airbag system of the vehicle does not affect the normal operation
of the system, the system shall be disabled before the test.
2.6 Test items
2.6.1 Parking capacity in front of parking space
2.6.1.1 Level parking capacity
2.6.1.1.1 Parallel parking space - spatial parking space
(1) Test scenario
The parking space consists of two stationary vehicles and a curb. The stationary
vehicles are aligned in the same direction and parallel to each other. The difference
between the width of the vehicle on both sid...
Share