1
/
の
12
PayPal, credit cards. Download editable-PDF & invoice in 1 second!
YY/T 1712-2021 English PDF (YYT1712-2021)
YY/T 1712-2021 English PDF (YYT1712-2021)
通常価格
$350.00 USD
通常価格
セール価格
$350.00 USD
単価
/
あたり
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
Delivery: 3 seconds. Download true-PDF + Invoice.
Get QUOTATION in 1-minute: Click YY/T 1712-2021
Historical versions: YY/T 1712-2021
Preview True-PDF (Reload/Scroll if blank)
YY/T 1712-2021: Assisted surgical medical equipment and assisted surgical medical system employing robotictechnology
YY/T 1712-2021
YY
PHARMACEUTICAL INDUSTRY STANDARD
OF THE PEOPLE’S REPUBLIC OF CHINA
ICS 11.040
C 39
Assisted surgical medical equipment and assisted
surgical medical system employing robotic
technology
ISSUED ON: MARCH 09, 2021
IMPLEMENTED ON: OCTOBER 01, 2022
Issued by: National Medical Products Administration
Table of Contents
Foreword ... 3
Introduction ... 4
1 Scope ... 5
2 Normative references ... 5
3 Terms and definitions ... 6
4 Requirements ... 10
4.1 Working environment conditions ... 10
4.2 Master-slave control RA equipment accuracy ... 10
4.3 RA equipment positioning accuracy under navigation guidance ... 11
4.4 Maximum space and effective workspace ... 12
4.5 Load bearing capacity of robotic arm ... 12
4.6 Master-slave control time delay ... 12
4.7 Environmental test... 12
4.8 Safety requirements ... 13
5 Test methods ... 14
5.1 Working environment conditions ... 14
5.2 Master-slave control RA equipment accuracy ... 14
5.3 RA equipment positioning accuracy under navigation guidance ... 24
5.4 Maximum space and effective workspace ... 27
5.5 Mechanical load bearing capacity ... 29
5.6 Master-slave control time delay ... 30
5.7 Environmental test... 32
5.8 Safety requirements ... 32
Assisted surgical medical equipment and assisted
surgical medical system employing robotic
technology
1 Scope
This Standard specifies the terms and definitions, requirements and test
methods for assisted surgical medical equipment and assisted surgical medical
system employing robotic technology.
This Standard applies to assisted surgical medical equipment and assisted
surgical medical system employing robotic technology (hereinafter referred to
as "RA equipment").
2 Normative references
The following documents are indispensable for the application of this document.
For dated references, only the dated version applies to this document. For
undated references, the latest edition (including all amendments) applies to this
document.
GB 9706.1, Medical electrical equipment - Part 1: General requirements for
basic safety and essential performance
GB/T 12642, Industrial robots - Performance criteria and related test
methods
GB/T 12643, Robots and robotic devices - Vocabulary
GB/T 14710, Environmental requirement and test methods for medical
electrical equipment
YY/T 0043, Medical suture needle
YY 0167, Non-absorbable surgical suture
YY/T 1686, Medical electrical equipment employing robotic technology -
Classification
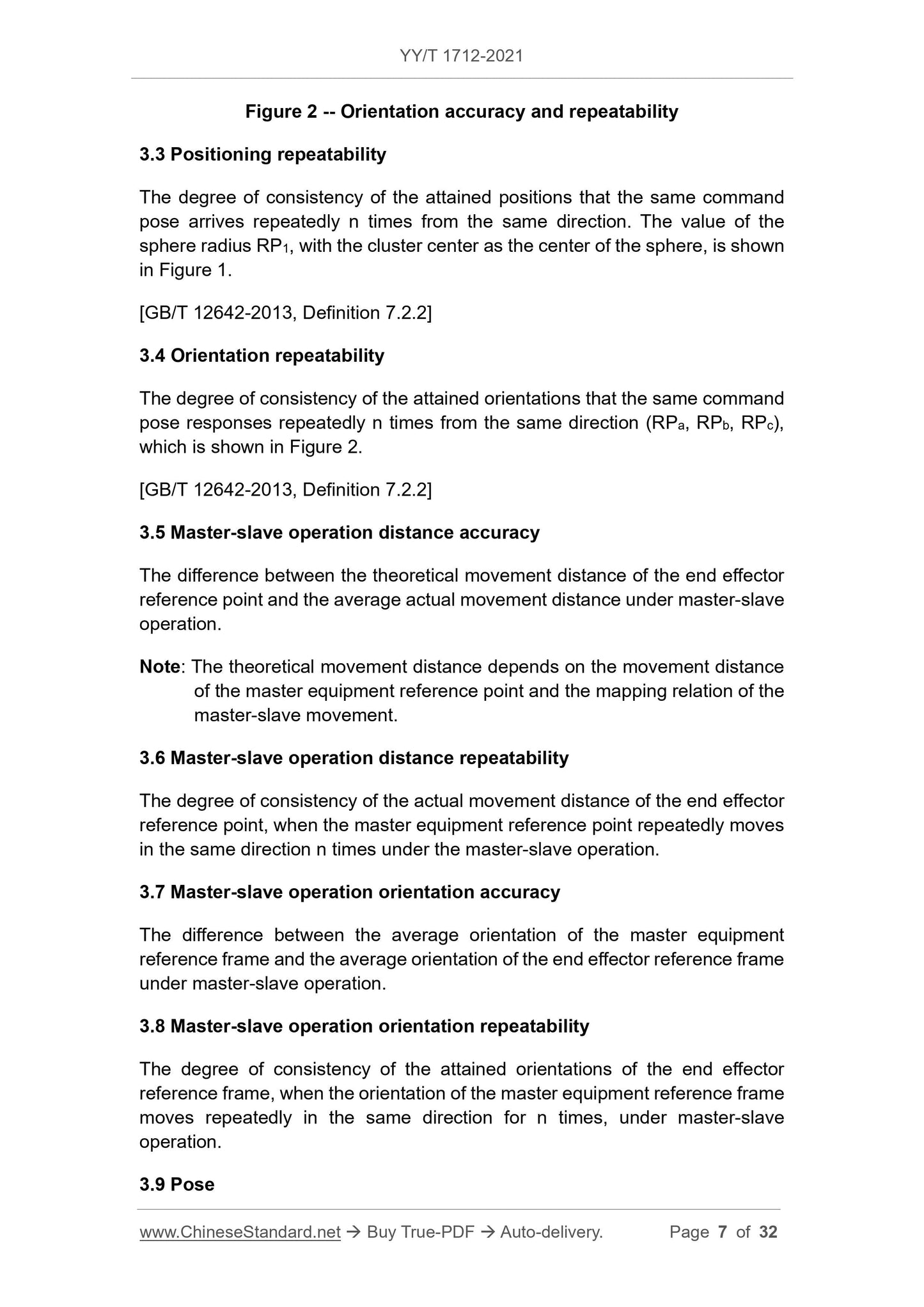
Figure 2 -- Orientation accuracy and repeatability
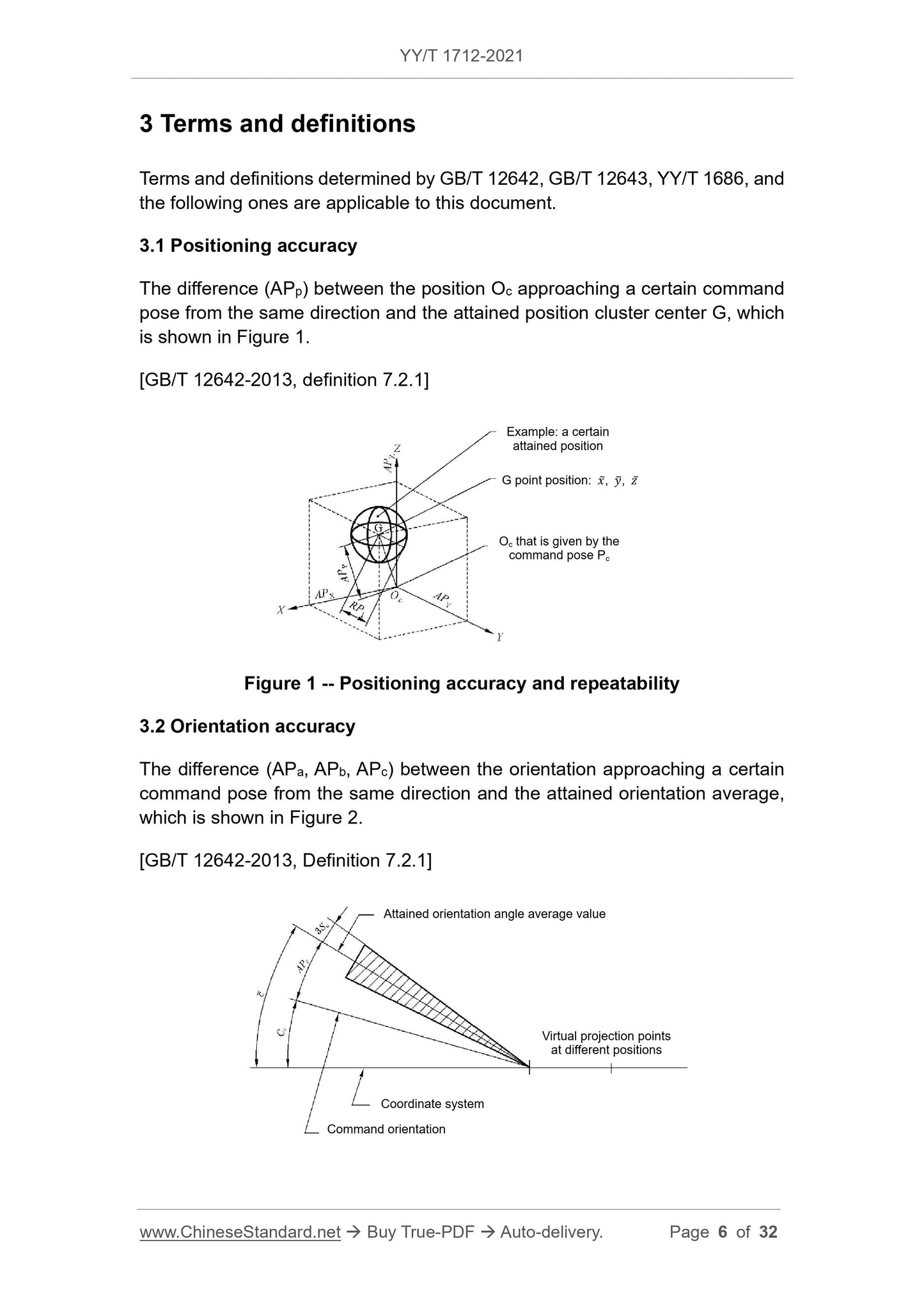
3.3 Positioning repeatability
The degree of consistency of the attained positions that the same command
pose arrives repeatedly n times from the same direction. The value of the
sphere radius RP1, with the cluster center as the center of the sphere, is shown
in Figure 1.
[GB/T 12642-2013, Definition 7.2.2]
3.4 Orientation repeatability
The degree of consistency of the attained orientations that the same command
pose responses repeatedly n times from the same direction (RPa, RPb, RPc),
which is shown in Figure 2.
[GB/T 12642-2013, Definition 7.2.2]
3.5 Master-slave operation distance accuracy
The difference between the theoretical movement distance of the end effector
reference point and the average actual movement distance under master-slave
operation.
Note: The theoretical movement distance depends on the movement distance
of the master equipment reference point and the mapping relation of the
master-slave movement.
3.6 Master-slave operation distance repeatability
The degree of consistency of the actual movement distance of the end effector
reference point, when the master equipment reference point repeatedly moves
in the same direction n times under the master-slave operation.
3.7 Master-slave operation orientation accuracy
The difference between the average orientation of the master equipment
reference frame and the average orientation of the end effector reference frame
under master-slave operation.
3.8 Master-slave operation orientation repeatability
The degree of consistency of the attained orientations of the end effector
reference frame, when the orientation of the master equipment reference frame
moves repeatedly in the same direction for n times, under master-slave
operation.
3.9 Pose
3.17 End effector
The equipment that is installed at the mechanical interface for the RA equipment
to complete its surgical tasks.
3.18 End effector reference point
The reference point that is set on the end effector for a certain purpose. In the
test, the geometric center of the last joint axis of the end effector is generally
used as the measurement reference point.
[GB/T 12643-2013/ISO 8373:2012, definition 4.9]
3.19 End effector reference frame
The reference frame that is set on the end effector for a certain purpose. During
the test, it is generally defined at the end effector reference point.
3.20 Master equipment reference point
The reference point that is set on the master equipment in order to reflect the
information of the doctor's hand operation during the operation. During the test,
the intersection of several joint axes at the end of the master equipment is
generally used as the measurement reference point.
3.21 Master equipment reference frame
The reference frame that is set on the master equipment in order to reflect the
information of the doctor's hand operation during the operation. During the test,
it is generally defined at the master equipment reference point.
3.22 Mechanical interface
The component, on the mounting surface of the RA equipment, that is allowed
to connect detachable accessories and components, or is operated by the RA
equipment movement.
Note 1: The mechanical interface can be used to attach sterile items.
Note 2: The mechanical interface can provide insulation and other functions
(such as aseptic boundaries) to meet basic security requirements.
Note 3: The RA equipment may have zero, one or more mechanical interfaces.
Note: Rewrite IEC 80601-2-77.
3.23 Master-slave control
The positioning repeatability shall meet the manufacturer's regulations in the
accompanying documents.
4.2.1.4 Orientation repeatability
The orientation repeatability shall meet the manufacturer's regulations in the
accompanying documents.
4.2.2 Master-slave operation accuracy and master-slave operation
repeatability
4.2.2.1 Master-slave operation distance accuracy
The master-slave operation distance accuracy shall meet the manufacturer's
regulations in the accompanying documents.
4.2.2.2 Master-slave operation distance repeatability
The master-slave operation distance repeatability shall meet the
manufacturer's regulations in the accompanying documents.
4.2.2.3 Master-slave operation orientation accuracy
The master-slave operation orientation accuracy shall meet the manufacturer's
regulations in the accompanying documents.
4.2.2.4 Master-slave operation orientation repeatability
The master-slave operation orientation repeatability shall meet the
manufacturer's regulations in the accompanying documents.
4.3 RA equipment positioning accuracy under navigation guidance
4.3.1 RA equipment positioning accuracy under navigation guidance
The positioning accuracy shall meet the manufacturer's regulations in the
accompanying documents.
4.3.2 RA equipment positioning ...
Get QUOTATION in 1-minute: Click YY/T 1712-2021
Historical versions: YY/T 1712-2021
Preview True-PDF (Reload/Scroll if blank)
YY/T 1712-2021: Assisted surgical medical equipment and assisted surgical medical system employing robotictechnology
YY/T 1712-2021
YY
PHARMACEUTICAL INDUSTRY STANDARD
OF THE PEOPLE’S REPUBLIC OF CHINA
ICS 11.040
C 39
Assisted surgical medical equipment and assisted
surgical medical system employing robotic
technology
ISSUED ON: MARCH 09, 2021
IMPLEMENTED ON: OCTOBER 01, 2022
Issued by: National Medical Products Administration
Table of Contents
Foreword ... 3
Introduction ... 4
1 Scope ... 5
2 Normative references ... 5
3 Terms and definitions ... 6
4 Requirements ... 10
4.1 Working environment conditions ... 10
4.2 Master-slave control RA equipment accuracy ... 10
4.3 RA equipment positioning accuracy under navigation guidance ... 11
4.4 Maximum space and effective workspace ... 12
4.5 Load bearing capacity of robotic arm ... 12
4.6 Master-slave control time delay ... 12
4.7 Environmental test... 12
4.8 Safety requirements ... 13
5 Test methods ... 14
5.1 Working environment conditions ... 14
5.2 Master-slave control RA equipment accuracy ... 14
5.3 RA equipment positioning accuracy under navigation guidance ... 24
5.4 Maximum space and effective workspace ... 27
5.5 Mechanical load bearing capacity ... 29
5.6 Master-slave control time delay ... 30
5.7 Environmental test... 32
5.8 Safety requirements ... 32
Assisted surgical medical equipment and assisted
surgical medical system employing robotic
technology
1 Scope
This Standard specifies the terms and definitions, requirements and test
methods for assisted surgical medical equipment and assisted surgical medical
system employing robotic technology.
This Standard applies to assisted surgical medical equipment and assisted
surgical medical system employing robotic technology (hereinafter referred to
as "RA equipment").
2 Normative references
The following documents are indispensable for the application of this document.
For dated references, only the dated version applies to this document. For
undated references, the latest edition (including all amendments) applies to this
document.
GB 9706.1, Medical electrical equipment - Part 1: General requirements for
basic safety and essential performance
GB/T 12642, Industrial robots - Performance criteria and related test
methods
GB/T 12643, Robots and robotic devices - Vocabulary
GB/T 14710, Environmental requirement and test methods for medical
electrical equipment
YY/T 0043, Medical suture needle
YY 0167, Non-absorbable surgical suture
YY/T 1686, Medical electrical equipment employing robotic technology -
Classification
Figure 2 -- Orientation accuracy and repeatability
3.3 Positioning repeatability
The degree of consistency of the attained positions that the same command
pose arrives repeatedly n times from the same direction. The value of the
sphere radius RP1, with the cluster center as the center of the sphere, is shown
in Figure 1.
[GB/T 12642-2013, Definition 7.2.2]
3.4 Orientation repeatability
The degree of consistency of the attained orientations that the same command
pose responses repeatedly n times from the same direction (RPa, RPb, RPc),
which is shown in Figure 2.
[GB/T 12642-2013, Definition 7.2.2]
3.5 Master-slave operation distance accuracy
The difference between the theoretical movement distance of the end effector
reference point and the average actual movement distance under master-slave
operation.
Note: The theoretical movement distance depends on the movement distance
of the master equipment reference point and the mapping relation of the
master-slave movement.
3.6 Master-slave operation distance repeatability
The degree of consistency of the actual movement distance of the end effector
reference point, when the master equipment reference point repeatedly moves
in the same direction n times under the master-slave operation.
3.7 Master-slave operation orientation accuracy
The difference between the average orientation of the master equipment
reference frame and the average orientation of the end effector reference frame
under master-slave operation.
3.8 Master-slave operation orientation repeatability
The degree of consistency of the attained orientations of the end effector
reference frame, when the orientation of the master equipment reference frame
moves repeatedly in the same direction for n times, under master-slave
operation.
3.9 Pose
3.17 End effector
The equipment that is installed at the mechanical interface for the RA equipment
to complete its surgical tasks.
3.18 End effector reference point
The reference point that is set on the end effector for a certain purpose. In the
test, the geometric center of the last joint axis of the end effector is generally
used as the measurement reference point.
[GB/T 12643-2013/ISO 8373:2012, definition 4.9]
3.19 End effector reference frame
The reference frame that is set on the end effector for a certain purpose. During
the test, it is generally defined at the end effector reference point.
3.20 Master equipment reference point
The reference point that is set on the master equipment in order to reflect the
information of the doctor's hand operation during the operation. During the test,
the intersection of several joint axes at the end of the master equipment is
generally used as the measurement reference point.
3.21 Master equipment reference frame
The reference frame that is set on the master equipment in order to reflect the
information of the doctor's hand operation during the operation. During the test,
it is generally defined at the master equipment reference point.
3.22 Mechanical interface
The component, on the mounting surface of the RA equipment, that is allowed
to connect detachable accessories and components, or is operated by the RA
equipment movement.
Note 1: The mechanical interface can be used to attach sterile items.
Note 2: The mechanical interface can provide insulation and other functions
(such as aseptic boundaries) to meet basic security requirements.
Note 3: The RA equipment may have zero, one or more mechanical interfaces.
Note: Rewrite IEC 80601-2-77.
3.23 Master-slave control
The positioning repeatability shall meet the manufacturer's regulations in the
accompanying documents.
4.2.1.4 Orientation repeatability
The orientation repeatability shall meet the manufacturer's regulations in the
accompanying documents.
4.2.2 Master-slave operation accuracy and master-slave operation
repeatability
4.2.2.1 Master-slave operation distance accuracy
The master-slave operation distance accuracy shall meet the manufacturer's
regulations in the accompanying documents.
4.2.2.2 Master-slave operation distance repeatability
The master-slave operation distance repeatability shall meet the
manufacturer's regulations in the accompanying documents.
4.2.2.3 Master-slave operation orientation accuracy
The master-slave operation orientation accuracy shall meet the manufacturer's
regulations in the accompanying documents.
4.2.2.4 Master-slave operation orientation repeatability
The master-slave operation orientation repeatability shall meet the
manufacturer's regulations in the accompanying documents.
4.3 RA equipment positioning accuracy under navigation guidance
4.3.1 RA equipment positioning accuracy under navigation guidance
The positioning accuracy shall meet the manufacturer's regulations in the
accompanying documents.
4.3.2 RA equipment positioning ...
Share