1
/
의
7
PayPal, credit cards. Download editable-PDF and invoice in 1 second!
GB 11291.1-2011 영어 PDF (GB11291.1-2011)
GB 11291.1-2011 영어 PDF (GB11291.1-2011)
정가
$175.00 USD
정가
할인가
$175.00 USD
단가
/
단위
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
배송: 3초. 실제 PDF + 송장을 다운로드하세요.
1분 안에 견적을 받으세요: GB 11291.1-2011을 클릭하세요
역사적 버전: GB 11291.1-2011
True-PDF 미리보기 (비어 있으면 다시 로드/스크롤)
GB 11291.1-2011: 산업 환경용 로봇 -- 안전 요구 사항 -- 제1부: 로봇
GB 11291.1-2011
산업 환경을 위한 로봇.안전 요구 사항.1부. 로봇
ICS 25.040.30
J28
중화인민공화국 국가표준
GB 11291-1997 교체
산업 환경을 위한 로봇 - 안전 요구 사항
1부. 로봇
1부. 로봇
(ISO 10218-1.2006, ISO 10218-1/Cor.1.2007, IDT)
발행일 2011-05-12
2011-10-01 구현
중화인민공화국 품질감독검사검역총국
중국표준화국 발표
목차
서문 Ⅰ
서론 Ⅱ
1 범위 1
2 규범적 참조 1
3 용어 및 정의
위험 식별 및 위험 평가 4 5
5 설계 요구 사항 및 보호 조치 6
6 15 정보를 활용하세요
부록 A(규범)에는 17가지 주요 위험이 나열되어 있습니다.
부록 B(규범) 정지 시간/거리 측정법 19
부록 C(정보) 3위치 활성화 장치 기능 20
부록 D (정보) 선택 사양 21
방법 부록 E(규범적) 작동 모드 마크 22
참고문헌 23
머리말
이 섹션의 모든 기술 내용은 필수입니다.
GB 11291 "산업 환경을 위한 로봇 - 안전 요구 사항"은 다음과 같은 섹션으로 구분됩니다.
--- 1부. 로봇;
--- 2부. 로봇 시스템과 통합.
이것은 GB 11291의 1부입니다.
본 조항은 GB/T 1.1-2009 규정에 따라 작성되었습니다.
이 부분은 GB 11291-1997 "산업용 로봇 안전 규정"을 대체합니다.
GB 11291-1997과 비교한 이 섹션의 주요 변경 사항은 다음과 같습니다.
--- 이 섹션에서는 GB/T 15706-2007에 더 부합하도록 일부 파일을 업데이트했으며 클래스 C 표준 검사 사용 요구 사항을 준수합니다.
테스트 요구 사항 및 해당 위험.
--- 이 섹션은 보안 제어 시스템 성능, 로봇 정지 작업과 관련된 것을 포함하여 새로운 기술 요구 사항을 증가시켰습니다(이에 국한되지 않음).
장치, 프로그램 검증, 무선 티칭 펜던트 가이드라인, 조인트 제어, 협동 로봇 가이드라인 및 최신 설계 안전을 활성화할 수 있습니다.
사양.
이 섹션은 국제 표준 ISO 10218-1.2006 "산업 환경에 대한 안전 요구 사항 - 1부 로봇"과 동일합니다.
(영어 버전) 및 ISO 10218-1/Cor.1.2007(개정된 영어판).
사용 편의성을 위해 이 편집 내용은 다음과 같이 변경되었습니다.
--- 이전에는 ISO 서문을 제거하기 위해 예약되었던 영어의 대문자 약어입니다.
--- ISO 10218은 "GB 11291" 및 "산업 환경용 로봇 - 안전 요구 사항"으로 변경됩니다. "국제 표준" 및
ISO 10218-1 단어 "이 섹션"과 "GB 11291.1";
--- 규범 문서는 국제 표준을 사용하여 국가 표준으로 번역되었습니다. 국가 표준 번호와 해당 국가 표준 번호를 다시 지정합니다.
국제표준 채택표준버전번호는 국가표준번호 뒤에 괄호로 표시, 사용편의성 및 접근성을 표시, 변환되지 않은 국제표준
승인된 휴가;
--- 원문을 삭제하는 것은 문자언어 기준에 맞지 않습니다.
국제문서의 표준과 다음 문서의 규범적 참고문헌 간의 일관성
--- GB/T 12642-2001 산업용 로봇 성능 사양 및 테스트 방법(eqvISO 9283.1998)
--- GB 16754-2008 기계 안전 - 비상 정지 설계 원칙(ISO 13850.2006, IDT);
--- GB/T 19876-2005 보호장비의 위치 결정 속도에 가까운 기계 및 신체 부위의 안전성(ISO 13855.
2002, MOD).
이 부분은 중국기계산업연합회에서 제안한 것입니다.
자동화 시스템의 이 부분과 통합은 국가 표준화 기술 위원회(SAC/TC159)에 의해 중앙화되었습니다.
이 섹션은 초안입니다. 베이징 기계 산업 자동화, 베이징 항공 우주 대학.
이 섹션의 주요 초안 작성자. 젊은 서평, 윤차오, 왕시시.
이 표준의 이 부분은 이전 버전을 대체합니다.
--- GB 11291-1997.
소개
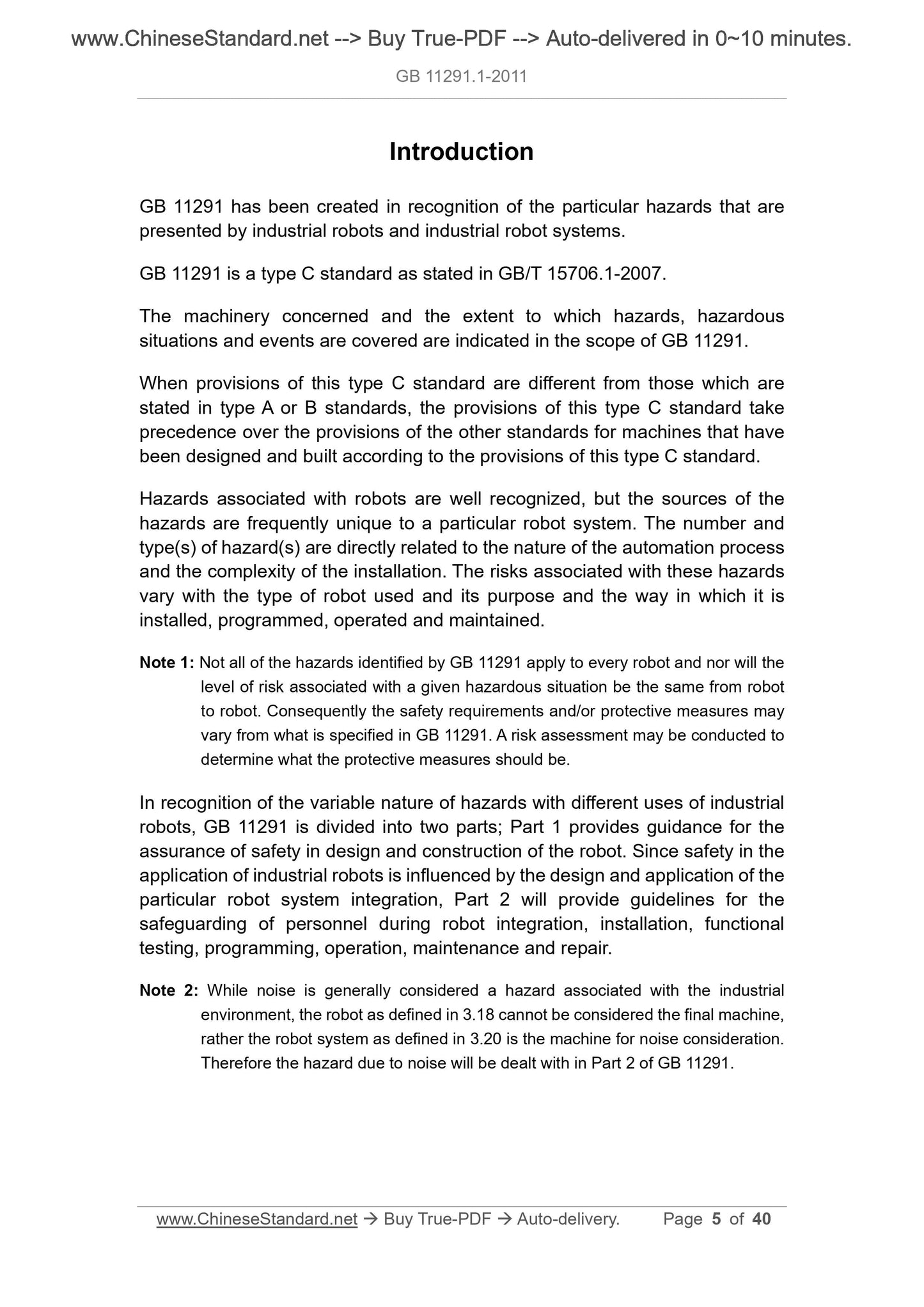
GB 11291은 산업용 로봇과 산업용 로봇 시스템이 특정 위험 기반으로 이어질 수 있다는 인식에 기초하고 있습니다.
GB 11291은 GB/T 15706.1-2007 표준 C등급이라고 합니다.
해당 기계, 위험 수준, 위험 요소 및 관련 사고에 대한 설명은 GB 11291의 맥락에서 설명되어 있습니다.
C급과 A급 기준 B급 기준 또는 기준은 다릅니다. C급은 기계의 표준 설계 및 제조에 따라 C급 기준 용어
다른 표준 용어보다 우선합니다.
관련 위험 로봇은 널리 알려져 있습니다. 그러나 위험 로봇 시스템의 다양한 소스의 사용은 종종 다르므로 위험 유형
자동화 프로세스는 로봇 설치의 수와 복잡성과 직접 관련이 있습니다. 로봇 사용 유형, 로봇 사용 목적에 따라
로봇의 설치, 프로그래밍, 작동 및 유지관리와 관련된 위험은 다양한 방식으로 나타나며 이로 인해 발생하는 위험도 서로 다릅니다.
참고 1. GB 11291에 설명된 모든 위험이 각 로봇에 적용되는 것은 아닙니다. 마찬가지로, 다른 기계의 특정 위험 상황의 위험 수준
세상은 다를 수 있습니다. 따라서 GB 11291 안전 요구 사항 및/또는 다양한 로봇에 대한 보호 조치의 조항은 다를 수 있습니다.
이를 통해 보호 조치를 결정하기 위해 위험 평가를 수행할 수 있습니다.
다양한 용도의 산업용 로봇이 서로 다른 위험 특성을 가지고 있다는 점을 인식하여 GB 11291은 두 부분으로 나뉩니다. 제1부에서는
보안 보증 지침은 로봇을 설계 및 제조할 때 특정 로봇 시스템 통합에 의한 산업용 로봇 애플리케이션 보안을 권장합니다.
설계 및 응용 분야의 영향, 2부에서는 로봇 통합, 설치, 기능 테스트, 프로그래밍, 운영, 유지보수 및 관련 인력의 수리를 제공합니다.
보안 지침 회원.
주 2. 산업 환경, 소음은 일반적으로 위험으로 간주되므로 3.18 조항에 따라 로봇은 최종 제품으로 간주될 수 없습니다. 협정
3.20 로봇 시스템은 소음 위험 기계를 고려하여 정의됩니다. 따라서 규정의 섹션 2 GB 11291에서 소음 위험
관리 조치.
산업 환경을 위한 로봇 - 안전 요구 사항
1부. 로봇
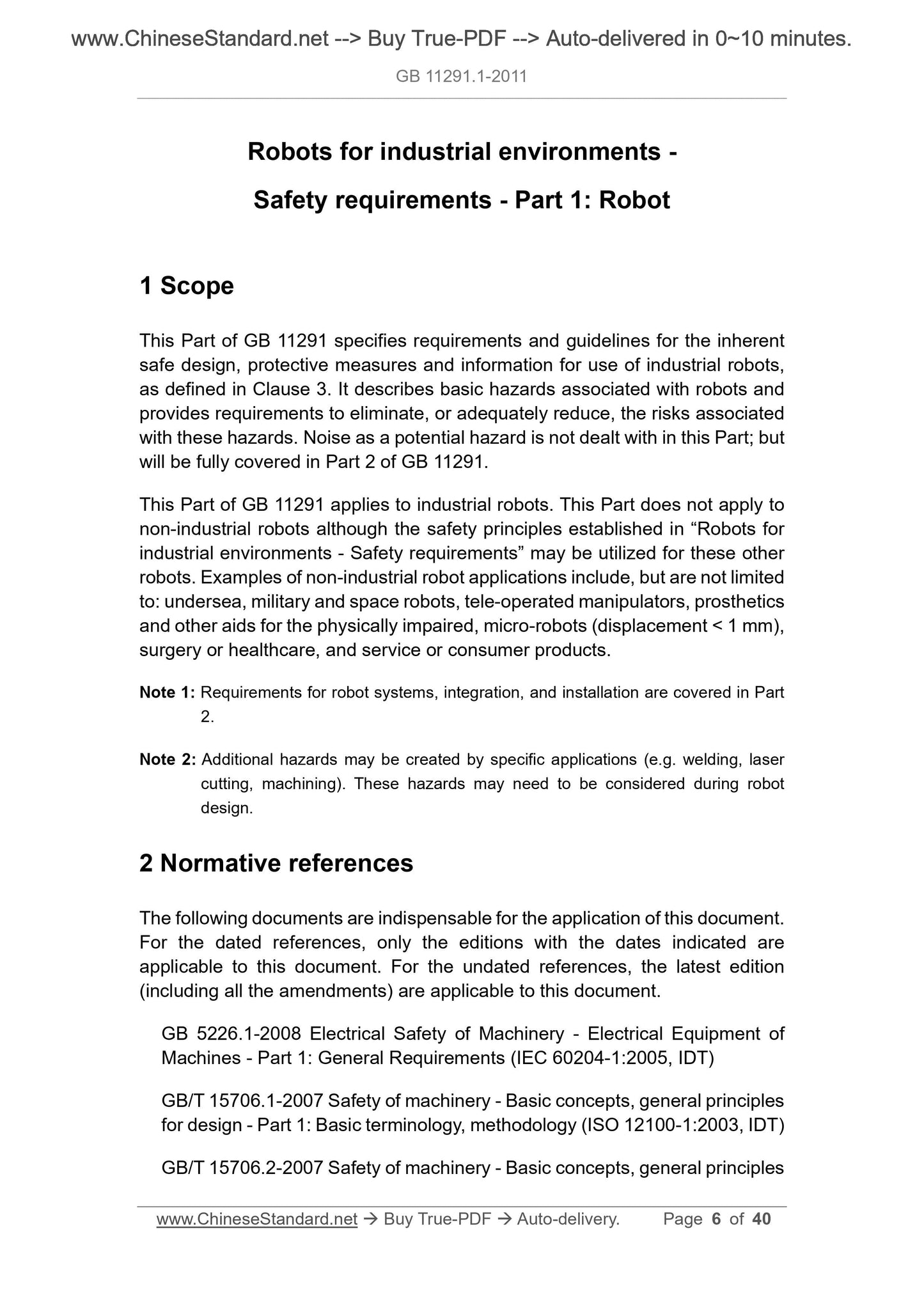
1 범위
산업용 로봇(제3장 정의)의 기본 보안 설계, 보호 조치 및 정보 사용에 관한 조항의 GB 11291
요구 사항 및 지침. 산업용 로봇의 기본 위험 관련 사항을 설명하고 이러한 요구 사항의 위험을 제거하거나 크게 줄이는 것을 제안합니다.
이 섹션에서는 소음을 잠재적 위험으로 다루지 않지만, 섹션 2 GB 11291에 포함되어 있습니다.
GB 11291 이 부분은 산업용 로봇에 적합합니다. "산업 환경을 위한 로봇 - 안전 요구 사항"이 확립한 안전 원칙은
다른 유형의 로봇을 사용할 수 있지만 이는 비산업용 로봇에는 적용되지 않습니다. 비산업용 로봇의 예로는 다음이 포함되지만 이에 국한되지는 않습니다.
In). 수중, 군사 및 우주 로봇, 로봇 원격 제어 보조 장치, 보철물 및 기타 신체 장애인, 마이크로 로봇(변위 범위)
Wai < 1mm), 수술 또는 재활 로봇, 서비스 및 소비자 로봇.
참고 1. 산업용 로봇 시스템 통합 및 설치 요구 사항은 2부에 포함되어 있습니다.
참고 2. 특수 응용 프로그램(용접, 레이저 절단, 가공 등)은 이러한 위험한 로봇 설계에서 추가적인 위험을 초래할 수 있으므로...
1분 안에 견적을 받으세요: GB 11291.1-2011을 클릭하세요
역사적 버전: GB 11291.1-2011
True-PDF 미리보기 (비어 있으면 다시 로드/스크롤)
GB 11291.1-2011: 산업 환경용 로봇 -- 안전 요구 사항 -- 제1부: 로봇
GB 11291.1-2011
산업 환경을 위한 로봇.안전 요구 사항.1부. 로봇
ICS 25.040.30
J28
중화인민공화국 국가표준
GB 11291-1997 교체
산업 환경을 위한 로봇 - 안전 요구 사항
1부. 로봇
1부. 로봇
(ISO 10218-1.2006, ISO 10218-1/Cor.1.2007, IDT)
발행일 2011-05-12
2011-10-01 구현
중화인민공화국 품질감독검사검역총국
중국표준화국 발표
목차
서문 Ⅰ
서론 Ⅱ
1 범위 1
2 규범적 참조 1
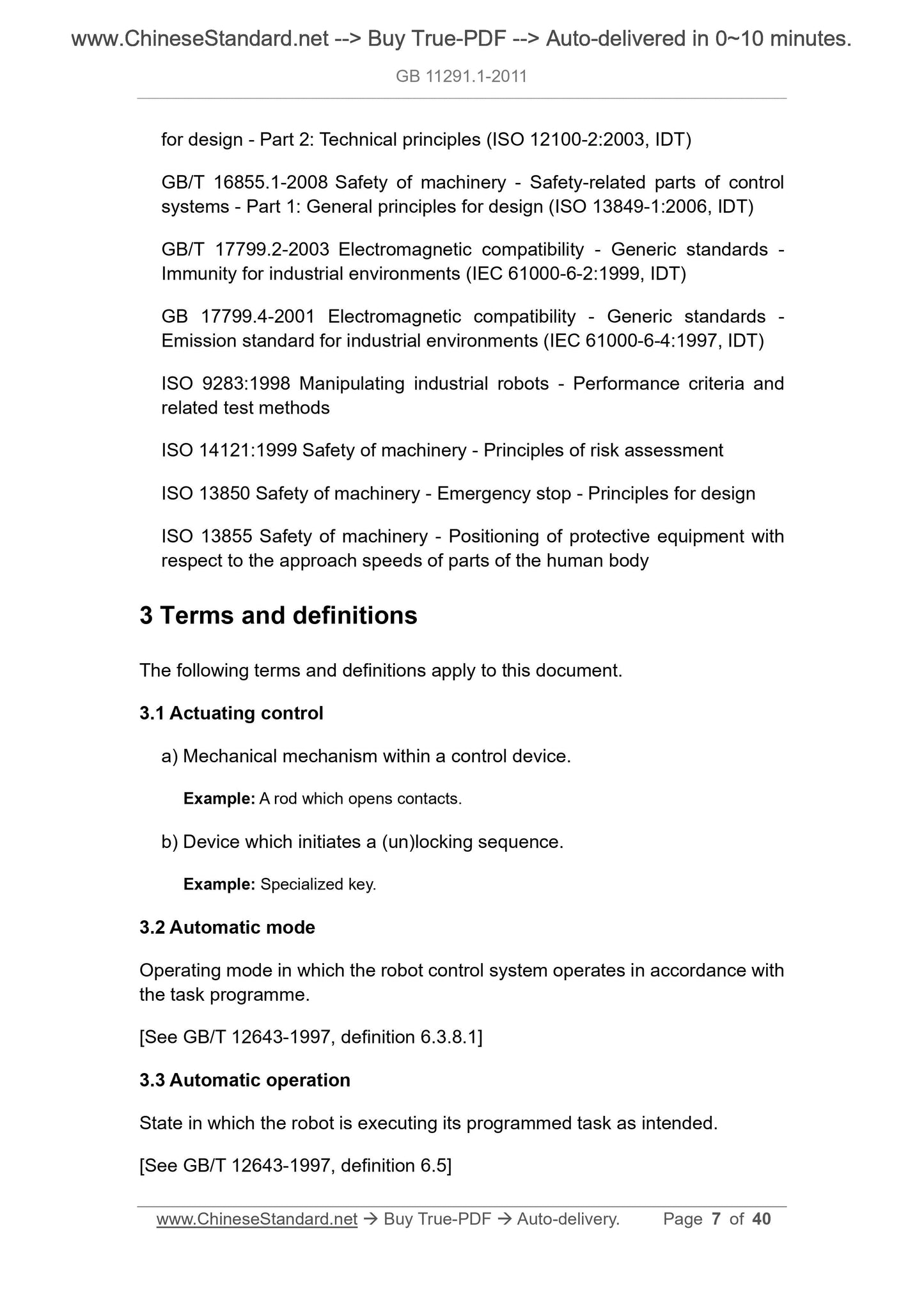
3 용어 및 정의
위험 식별 및 위험 평가 4 5
5 설계 요구 사항 및 보호 조치 6
6 15 정보를 활용하세요
부록 A(규범)에는 17가지 주요 위험이 나열되어 있습니다.
부록 B(규범) 정지 시간/거리 측정법 19
부록 C(정보) 3위치 활성화 장치 기능 20
부록 D (정보) 선택 사양 21
방법 부록 E(규범적) 작동 모드 마크 22
참고문헌 23
머리말
이 섹션의 모든 기술 내용은 필수입니다.
GB 11291 "산업 환경을 위한 로봇 - 안전 요구 사항"은 다음과 같은 섹션으로 구분됩니다.
--- 1부. 로봇;
--- 2부. 로봇 시스템과 통합.
이것은 GB 11291의 1부입니다.
본 조항은 GB/T 1.1-2009 규정에 따라 작성되었습니다.
이 부분은 GB 11291-1997 "산업용 로봇 안전 규정"을 대체합니다.
GB 11291-1997과 비교한 이 섹션의 주요 변경 사항은 다음과 같습니다.
--- 이 섹션에서는 GB/T 15706-2007에 더 부합하도록 일부 파일을 업데이트했으며 클래스 C 표준 검사 사용 요구 사항을 준수합니다.
테스트 요구 사항 및 해당 위험.
--- 이 섹션은 보안 제어 시스템 성능, 로봇 정지 작업과 관련된 것을 포함하여 새로운 기술 요구 사항을 증가시켰습니다(이에 국한되지 않음).
장치, 프로그램 검증, 무선 티칭 펜던트 가이드라인, 조인트 제어, 협동 로봇 가이드라인 및 최신 설계 안전을 활성화할 수 있습니다.
사양.
이 섹션은 국제 표준 ISO 10218-1.2006 "산업 환경에 대한 안전 요구 사항 - 1부 로봇"과 동일합니다.
(영어 버전) 및 ISO 10218-1/Cor.1.2007(개정된 영어판).
사용 편의성을 위해 이 편집 내용은 다음과 같이 변경되었습니다.
--- 이전에는 ISO 서문을 제거하기 위해 예약되었던 영어의 대문자 약어입니다.
--- ISO 10218은 "GB 11291" 및 "산업 환경용 로봇 - 안전 요구 사항"으로 변경됩니다. "국제 표준" 및
ISO 10218-1 단어 "이 섹션"과 "GB 11291.1";
--- 규범 문서는 국제 표준을 사용하여 국가 표준으로 번역되었습니다. 국가 표준 번호와 해당 국가 표준 번호를 다시 지정합니다.
국제표준 채택표준버전번호는 국가표준번호 뒤에 괄호로 표시, 사용편의성 및 접근성을 표시, 변환되지 않은 국제표준
승인된 휴가;
--- 원문을 삭제하는 것은 문자언어 기준에 맞지 않습니다.
국제문서의 표준과 다음 문서의 규범적 참고문헌 간의 일관성
--- GB/T 12642-2001 산업용 로봇 성능 사양 및 테스트 방법(eqvISO 9283.1998)
--- GB 16754-2008 기계 안전 - 비상 정지 설계 원칙(ISO 13850.2006, IDT);
--- GB/T 19876-2005 보호장비의 위치 결정 속도에 가까운 기계 및 신체 부위의 안전성(ISO 13855.
2002, MOD).
이 부분은 중국기계산업연합회에서 제안한 것입니다.
자동화 시스템의 이 부분과 통합은 국가 표준화 기술 위원회(SAC/TC159)에 의해 중앙화되었습니다.
이 섹션은 초안입니다. 베이징 기계 산업 자동화, 베이징 항공 우주 대학.
이 섹션의 주요 초안 작성자. 젊은 서평, 윤차오, 왕시시.
이 표준의 이 부분은 이전 버전을 대체합니다.
--- GB 11291-1997.
소개
GB 11291은 산업용 로봇과 산업용 로봇 시스템이 특정 위험 기반으로 이어질 수 있다는 인식에 기초하고 있습니다.
GB 11291은 GB/T 15706.1-2007 표준 C등급이라고 합니다.
해당 기계, 위험 수준, 위험 요소 및 관련 사고에 대한 설명은 GB 11291의 맥락에서 설명되어 있습니다.
C급과 A급 기준 B급 기준 또는 기준은 다릅니다. C급은 기계의 표준 설계 및 제조에 따라 C급 기준 용어
다른 표준 용어보다 우선합니다.
관련 위험 로봇은 널리 알려져 있습니다. 그러나 위험 로봇 시스템의 다양한 소스의 사용은 종종 다르므로 위험 유형
자동화 프로세스는 로봇 설치의 수와 복잡성과 직접 관련이 있습니다. 로봇 사용 유형, 로봇 사용 목적에 따라
로봇의 설치, 프로그래밍, 작동 및 유지관리와 관련된 위험은 다양한 방식으로 나타나며 이로 인해 발생하는 위험도 서로 다릅니다.
참고 1. GB 11291에 설명된 모든 위험이 각 로봇에 적용되는 것은 아닙니다. 마찬가지로, 다른 기계의 특정 위험 상황의 위험 수준
세상은 다를 수 있습니다. 따라서 GB 11291 안전 요구 사항 및/또는 다양한 로봇에 대한 보호 조치의 조항은 다를 수 있습니다.
이를 통해 보호 조치를 결정하기 위해 위험 평가를 수행할 수 있습니다.
다양한 용도의 산업용 로봇이 서로 다른 위험 특성을 가지고 있다는 점을 인식하여 GB 11291은 두 부분으로 나뉩니다. 제1부에서는
보안 보증 지침은 로봇을 설계 및 제조할 때 특정 로봇 시스템 통합에 의한 산업용 로봇 애플리케이션 보안을 권장합니다.
설계 및 응용 분야의 영향, 2부에서는 로봇 통합, 설치, 기능 테스트, 프로그래밍, 운영, 유지보수 및 관련 인력의 수리를 제공합니다.
보안 지침 회원.
주 2. 산업 환경, 소음은 일반적으로 위험으로 간주되므로 3.18 조항에 따라 로봇은 최종 제품으로 간주될 수 없습니다. 협정
3.20 로봇 시스템은 소음 위험 기계를 고려하여 정의됩니다. 따라서 규정의 섹션 2 GB 11291에서 소음 위험
관리 조치.
산업 환경을 위한 로봇 - 안전 요구 사항
1부. 로봇
1 범위
산업용 로봇(제3장 정의)의 기본 보안 설계, 보호 조치 및 정보 사용에 관한 조항의 GB 11291
요구 사항 및 지침. 산업용 로봇의 기본 위험 관련 사항을 설명하고 이러한 요구 사항의 위험을 제거하거나 크게 줄이는 것을 제안합니다.
이 섹션에서는 소음을 잠재적 위험으로 다루지 않지만, 섹션 2 GB 11291에 포함되어 있습니다.
GB 11291 이 부분은 산업용 로봇에 적합합니다. "산업 환경을 위한 로봇 - 안전 요구 사항"이 확립한 안전 원칙은
다른 유형의 로봇을 사용할 수 있지만 이는 비산업용 로봇에는 적용되지 않습니다. 비산업용 로봇의 예로는 다음이 포함되지만 이에 국한되지는 않습니다.
In). 수중, 군사 및 우주 로봇, 로봇 원격 제어 보조 장치, 보철물 및 기타 신체 장애인, 마이크로 로봇(변위 범위)
Wai < 1mm), 수술 또는 재활 로봇, 서비스 및 소비자 로봇.
참고 1. 산업용 로봇 시스템 통합 및 설치 요구 사항은 2부에 포함되어 있습니다.
참고 2. 특수 응용 프로그램(용접, 레이저 절단, 가공 등)은 이러한 위험한 로봇 설계에서 추가적인 위험을 초래할 수 있으므로...
공유하다