1
/
of
5
PayPal, credit cards. Download editable-PDF and invoice in 1 second!
GB/T 38679-2020 English PDF (GBT38679-2020)
GB/T 38679-2020 English PDF (GBT38679-2020)
Regular price
$170.00 USD
Regular price
Sale price
$170.00 USD
Unit price
/
per
Shipping calculated at checkout.
Couldn't load pickup availability
Delivery: 3 seconds. Download true-PDF + Invoice.
Get QUOTATION in 1-minute: Click GB/T 38679-2020
Historical versions: GB/T 38679-2020
Preview True-PDF (Reload/Scroll if blank)
GB/T 38679-2020: Test method for vehicle running deviation
GB/T 38679-2020
NATIONAL STANDARD OF THE
PEOPLE’S REPUBLIC OF CHINA
ICS 43.020
T 40
Test method for vehicle running deviation
ISSUED ON: MARCH 31, 2020
IMPLEMENTED ON: OCTOBER 01, 2020
Issued by: State Administration for Market Regulation;
Standardization Administration of the People’s Republic of
China.
Table of Contents
Foreword ... 3
1 Scope ... 4
2 Normative references ... 4
3 Requirements ... 4
4 Test conditions ... 5
5 Test method ... 6
Appendix A (Informative) Data table of vehicle running deviation test ... 10
Test method for vehicle running deviation
1 Scope
This Standard stipulates the conditions and methods of the running deviation
distance test of vehicle when it runs on a straight road at a constant speed.
This Standard applies to type-M and type-N vehicles.
2 Normative references
The following documents are indispensable for the application of this document.
For dated references, only the dated version applies to this document. For
undated references, the latest edition (including all amendments) applies to this
document.
GB/T 12534, Motor vehicles - General rules of road test method
GB/T 15089, Classification of power-driven vehicles and trailers
3 Requirements
Terms and definitions determined by GB/T 15089 and the following ones are
applicable to this document.
3.1 Vehicle running deviation
When the vehicle runs straight on a straight road at a constant speed of 60
km/h, under the condition that the driver does not apply any external force to
the steering wheel, the phenomenon that the vehicle cannot maintain a straight-
line running state and deviates on its own.
3.2 Running deviation distance
The vertical distance that the vehicle deviates from the axis of the driving
direction at the starting point of measurement.
Note: in meters (m).
3.3 Running deviation angle
The difference of the angle between the driving direction of the vehicle and the
road centerline at the start and end points of measurement.
4.4.1 General requirements
The vehicle shall be clean; the windows and the ventilation devices in the
passenger compartment shall be closed. Unless there are special requirements
for the test vehicle, the driving mode shall be the normal driving mode that is
recommended by the car manufacturer.
4.4.2 Tire
The tire pressure is charged to the value that is specified by the car
manufacturer. The model, tread pattern, pattern depth and tire pressure of the
coaxial left and right tires shall be consistent. The tread pattern depth of the tire
shall not be less than 50% of the initial tread pattern depth.
4.4.3 Load state
The vehicle is of complete vehicle kerb mass, except for the driver and testing
equipment.
4.5 Others
Other test conditions and test vehicle preparations shall comply with the
provisions of GB/T 12534.
5 Test method
5.1 Test process
5.1.1 Accelerate the test vehicle to 60 km/h along the center line of the test road
as shown in Figure 1, and then travels straight to point A at a uniform speed of
60 km/h.
5.1.2 When the front end of the vehicle reaches point A, both hands release the
steering wheel, to keep the vehicle at a speed of (60 ± 2) km/h to the end point
Pn. At point A, after both hands release the steering wheel, the yaw rate of the
vehicle shall be no more than 2 (°)/s.
5.1.3 Start sampling from point P0 at a certain sampling frequency (20 Hz is
recommended) and collect data (including vehicle speed, direction, position)
from point P1, P2, ..., to point Pn.
5.1.4 In order to eliminate the influence on the vehicle running deviation
distance from the residual force on the steering wheel when entering the
running deviation test area, if the distance between point A and point P0 is not
less than 40 m, collect no data.
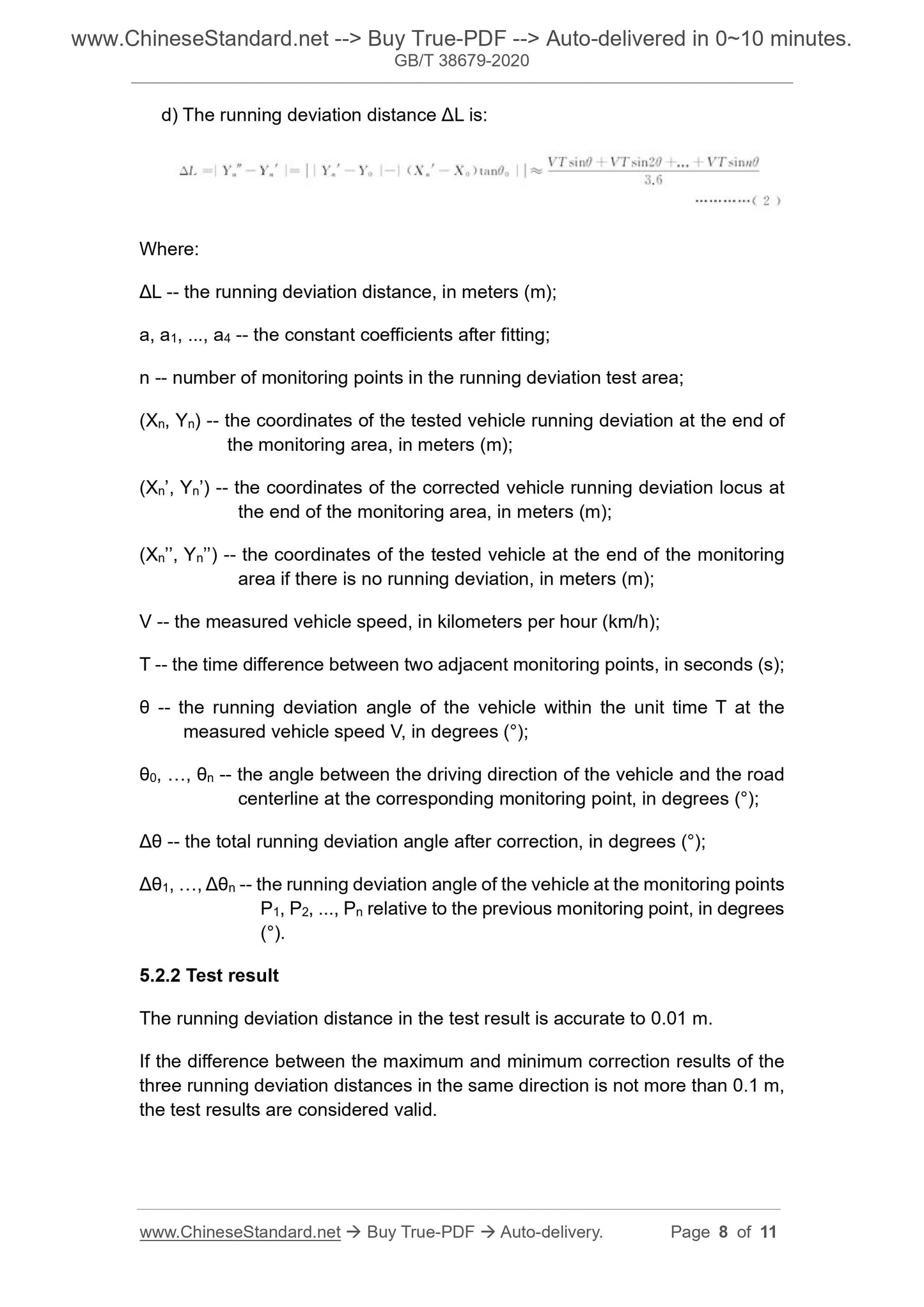
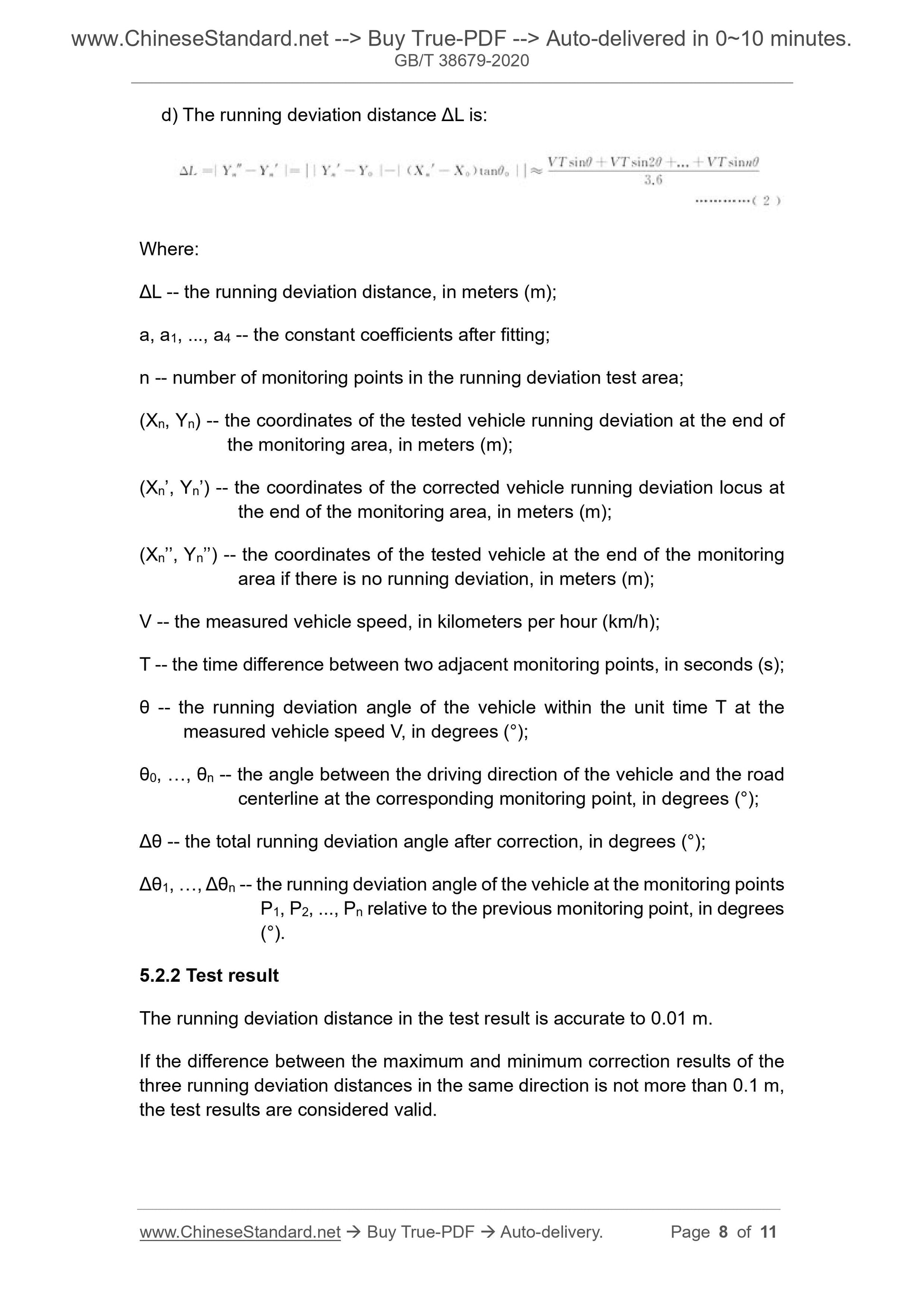
d) The running deviation distance ΔL is:
Where:
ΔL -- the running deviation distance, in meters (m);
a, a1, ..., a4 -- the constant coefficients after fitting;
n -- number of monitoring points in the running deviation test area;
(Xn, Yn) -- the coordinates of the tested vehicle running deviation at the end of
the monitoring area, in meters (m);
(Xn’, Yn’) -- the coordinates of the corrected vehicle running deviation locus at
the end of the monitoring area, in meters (m);
(Xn’’, Yn’’) -- the coordinates of the tested vehicle at the end of the monitoring
area if there is no running deviation, in meters (m);
V -- the measured vehicle speed, in kilometers per hour (km/h);
T -- the time difference between two adjacent monitoring points, in seconds (s);
θ -- the running deviation angle of the vehicle within the unit time T at the
measured vehicle speed V, in degrees (°);
θ0, …, θn -- the angle between the driving direction of the vehicle and the road
centerline at the corresponding monitoring point, in degrees (°);
Δθ -- the total running deviation angle after correction, in degrees (°);
Δθ1, …, Δθn -- the running deviation angle of the vehicle at the monitoring points
P1, P2, ..., Pn relative to the previous monitoring point, in degrees
(°).
5.2.2 Test result
The running deviation distance in the test result is accurate to 0.01 m.
If the difference between the maximum and minimum correction results of the
three running deviation distances in the same direction is not more than 0.1 m,
the test results are considered valid.
Get QUOTATION in 1-minute: Click GB/T 38679-2020
Historical versions: GB/T 38679-2020
Preview True-PDF (Reload/Scroll if blank)
GB/T 38679-2020: Test method for vehicle running deviation
GB/T 38679-2020
NATIONAL STANDARD OF THE
PEOPLE’S REPUBLIC OF CHINA
ICS 43.020
T 40
Test method for vehicle running deviation
ISSUED ON: MARCH 31, 2020
IMPLEMENTED ON: OCTOBER 01, 2020
Issued by: State Administration for Market Regulation;
Standardization Administration of the People’s Republic of
China.
Table of Contents
Foreword ... 3
1 Scope ... 4
2 Normative references ... 4
3 Requirements ... 4
4 Test conditions ... 5
5 Test method ... 6
Appendix A (Informative) Data table of vehicle running deviation test ... 10
Test method for vehicle running deviation
1 Scope
This Standard stipulates the conditions and methods of the running deviation
distance test of vehicle when it runs on a straight road at a constant speed.
This Standard applies to type-M and type-N vehicles.
2 Normative references
The following documents are indispensable for the application of this document.
For dated references, only the dated version applies to this document. For
undated references, the latest edition (including all amendments) applies to this
document.
GB/T 12534, Motor vehicles - General rules of road test method
GB/T 15089, Classification of power-driven vehicles and trailers
3 Requirements
Terms and definitions determined by GB/T 15089 and the following ones are
applicable to this document.
3.1 Vehicle running deviation
When the vehicle runs straight on a straight road at a constant speed of 60
km/h, under the condition that the driver does not apply any external force to
the steering wheel, the phenomenon that the vehicle cannot maintain a straight-
line running state and deviates on its own.
3.2 Running deviation distance
The vertical distance that the vehicle deviates from the axis of the driving
direction at the starting point of measurement.
Note: in meters (m).
3.3 Running deviation angle
The difference of the angle between the driving direction of the vehicle and the
road centerline at the start and end points of measurement.
4.4.1 General requirements
The vehicle shall be clean; the windows and the ventilation devices in the
passenger compartment shall be closed. Unless there are special requirements
for the test vehicle, the driving mode shall be the normal driving mode that is
recommended by the car manufacturer.
4.4.2 Tire
The tire pressure is charged to the value that is specified by the car
manufacturer. The model, tread pattern, pattern depth and tire pressure of the
coaxial left and right tires shall be consistent. The tread pattern depth of the tire
shall not be less than 50% of the initial tread pattern depth.
4.4.3 Load state
The vehicle is of complete vehicle kerb mass, except for the driver and testing
equipment.
4.5 Others
Other test conditions and test vehicle preparations shall comply with the
provisions of GB/T 12534.
5 Test method
5.1 Test process
5.1.1 Accelerate the test vehicle to 60 km/h along the center line of the test road
as shown in Figure 1, and then travels straight to point A at a uniform speed of
60 km/h.
5.1.2 When the front end of the vehicle reaches point A, both hands release the
steering wheel, to keep the vehicle at a speed of (60 ± 2) km/h to the end point
Pn. At point A, after both hands release the steering wheel, the yaw rate of the
vehicle shall be no more than 2 (°)/s.
5.1.3 Start sampling from point P0 at a certain sampling frequency (20 Hz is
recommended) and collect data (including vehicle speed, direction, position)
from point P1, P2, ..., to point Pn.
5.1.4 In order to eliminate the influence on the vehicle running deviation
distance from the residual force on the steering wheel when entering the
running deviation test area, if the distance between point A and point P0 is not
less than 40 m, collect no data.
d) The running deviation distance ΔL is:
Where:
ΔL -- the running deviation distance, in meters (m);
a, a1, ..., a4 -- the constant coefficients after fitting;
n -- number of monitoring points in the running deviation test area;
(Xn, Yn) -- the coordinates of the tested vehicle running deviation at the end of
the monitoring area, in meters (m);
(Xn’, Yn’) -- the coordinates of the corrected vehicle running deviation locus at
the end of the monitoring area, in meters (m);
(Xn’’, Yn’’) -- the coordinates of the tested vehicle at the end of the monitoring
area if there is no running deviation, in meters (m);
V -- the measured vehicle speed, in kilometers per hour (km/h);
T -- the time difference between two adjacent monitoring points, in seconds (s);
θ -- the running deviation angle of the vehicle within the unit time T at the
measured vehicle speed V, in degrees (°);
θ0, …, θn -- the angle between the driving direction of the vehicle and the road
centerline at the corresponding monitoring point, in degrees (°);
Δθ -- the total running deviation angle after correction, in degrees (°);
Δθ1, …, Δθn -- the running deviation angle of the vehicle at the monitoring points
P1, P2, ..., Pn relative to the previous monitoring point, in degrees
(°).
5.2.2 Test result
The running deviation distance in the test result is accurate to 0.01 m.
If the difference between the maximum and minimum correction results of the
three running deviation distances in the same direction is not more than 0.1 m,
the test results are considered valid.
Share